

Előszó
A ’70-es évek elején felsejlő új fenyegetések elképesztő fejlesztésre sarkallták a szovjet tervezőket, ami egy új honi légvédelmi rakéta-rendszer család megjelenéséhez vezetett. Ez lett az híres-hírhedt Sz-300 család. Lássuk hát ennek történetét a kezdetektől.
Aki élőszóban jobban szereti, annak videón is a tartalom.
Az Sz-300 család eredete
1966 decemberében az Sz-200-as rendszer sikeres tesztelését követően a Katonai Ipari Bizottság határozata szerint a tervező irodák vezető fejlesztőinek javaslatot kellett tenniük egy új generációs, de egységes légvédelmi rakéta rendszer létrehozására, a honi légvédelem, a szárazföldi csapatok és a flotta cirkálói számára. A leendő rendszernek több célcsatornásnak és közepes hatótávolságúnak kellett lennie. A többi követelményt a fegyvernemek határozták meg, a fejlesztés során figyelembe kellett venni azokat.
A szovjet védelmi szférát sem kerülte el a technokrata megközelítés, nevezetesen, hogy az „egy eszközcsalád legyen mindenre is jó mindenkinek”, ahogy Egyesült Államokban Robert McNamara kitalálta ezt, F-111 többfeladatú vadászgéppel. Az F-111 az eredeti célkitűzést nem teljesítette, lásd az erről szóló korábbi anyagot,[1] de 1966 végén még nem lehetett tudni, hogy az ötlet nem volt szerencsés, ezért a szovjetek is szimpatizáltak az akkor költséghatékonynak tűnő megközelítéssel. A fegyvernemek elvárásai a következők voltak:

- A Honi Légvédelem számára a kis magasságon érkező repülőgépek és a jövőben kifejlesztett robotrepülőgép / cirkáló rakéták jelentették a fő kihívást. Ezekkel az Sz-25 Berkut rendszer Moszkva körül nem tudott mit kezdeni, de még az azt követő SzA-75 Dvina és Sz-75M Volhov családok sem. A Volhov rendszer minimális megsemmisítési magassága csak 1970-ben csökkent le 100 méterre. A mobilitás növelése is elvárás volt, rendszer elemei részben önjáró, részben vonatott gumikerekes alvázokon az akkoriban jellemző órák helyett immáron percek alatt kellett, hogy áttelepüljön. A kívánalmak között szerepelt, hogy még a legnagyobb Sz-200-as osztálycsoportnál, tehát ötnél több célcsatornával kell rendelkeznie. Ezen felül a rakétától elvárták, hogy egyfokozatú legyen, nehogy a kiégett gyorsító fokozat Moszkva körül fekvő dácsákra zuhanjon.
- A flotta számára a hajó elleni rakéták és robotrepülők jelentették a fő fenyegetést, itt is megjósolható volt a kismagasságú képesség szükségessége. A hajóegységek méretbeli megkötései miatt függőleges indítás, a biztonság miatt hideg indítás volt követelmény. Tehát nem lehetett a rakéta hajtóművét beindítani a rakéta konténerében. Folyékony, illékony és mérgező hajtóanyag használata üzemanyagként szóba sem jöhetett. Hozzá teszem, az összes fegyvernem habozás nélkül lemondott volna a folyékony hajtóanyagú rakétákról azok körülményes üzemeltetése miatt is.
- A hadsereg teljesen önjáró, atom- és vegyi támadás ellen védett, repeszálló lánctalpas járműveket, és a végfázisban manőverező Pershing ballisztikus rakéta elfogására alkalmas rendszert várt el. Természetesen alkalmasnak kellett lennie, a nagy túlterheléssel manőverező, zavarást alkalmazó vadászgép és vadászbombázók megsemmisítésére is.

Ahogy telt-múlt az idő úgy látszódott, hogy ez a fegyvernemi közös ötletelés nem vezet jóra. Ekkorra már kiderült, hogy az F-111, mint egy közös platform csúfosan megbukott. Az új szovjet légvédelmi rakéta-rendszernél is az elvárások annyira különbözőek voltak, hogy emiatt 1969-ben változtattak a koncepción. Miután Dmitrij Fjodorovics Usztyinov végig követte a vitát, a későbbi védelmi miniszter úgy határozott, hogy egy konferenciát hív össze az összes érintett fél részvételével. Sok felszólalás után, mindenkit meghallgatva úgy döntött, hogy két fő változatot kell kidolgozni, és azokat funkcionálisan is szét kell választani.
- A honi légvédelem Sz-300P és a flotta számára készített Sz-300F komplexum létrehozásakor a fő erőfeszítést a kis magasságon repülő célpontok elleni küzdelem problémájának megoldására kell összpontosítani.
- A szárazföldi csapatok számára tervezett Sz-300V létrehozásakor az amerikai Pershing 1A ballisztikus rakéták elfogására összpontosítsanak, amelyeket akkoriban telepítettek Nyugat-Európába. Később már a Pershing 2 rakéta elleni képességet is elvárták, de ez a rakéta akkor még nem is létezett.
Tehát a 300 után az az egy betű eltérés két egymástól teljesen eltérő családot takar, annak ellenére, hogy az eredeti elgondolás szerint legalább a fő elemeknek azonosnak kellett volna lennie, azonos vezérléssel. A későbbiekben majd látjuk, hogy még ezt sem sikerült megvalósítani.
A Honi Légvédelem szemüvegén keresztül nézve a cél egy olyan légvédelmi rendszer megalkotása volt, ami képes volt az akár csak 25 méter magasan repülő célokat is leküzdeni még akkor is, ha azok tömegesen érkeznek. Tehát az új légvédelmi rendszer egyetlen osztályának is több célcsatornásnak kellett lennie, mint az ötosztályos Sz-200 rendszernek, így lett hat célcsatorna az elvárás, hogy ezen a területen is előrelépést jelentsen. Legalább a Sz-75M Volhov hatótávolságát el kellett érni, ami 55 km volt szubszonikus célok ellen. Ezzel és a kismagasságú képességgel az új légvédelmi rakéta rendszerrel első lépésben leváltható volt az Sz-75M Volhov, Sz-125M Nyeva, illetve az Sz-25M Berkut rendszerek Moszkva körül.
A távlati terv ennél azonban sokkal több volt. Már a kezdetekor megfogalmazott cél nemcsak a Volhov és Nyeva, hanem az Sz-200 leváltása is az Sz-300P családdal. Ehhez az Sz-200D Dubna 300 kilométeres megsemmisítési távolságát is el kellett érni a továbbfejlesztésekkel. Ez nem volt egyszerű feladat, ezért igen bölcsen a lépcsőzetes fejlesztés mellett döntöttek, nem első nekifutásra próbálták megoldani a gigászi feladatot. Némileg elspoilerezve a távoli jövőt, a 300 kilométeres megsemmisítési zónát végül az Sz-400 változat érte el a 40N6 rakétával. Igen, bizony, az is egy Sz-300 változat, csak egy csinos kis új marketing címkét kapott. Azt, hogy az eredeti távlati cél elérésére majd 40 (!) évet várni, azt akkor még senki sem sejtette...
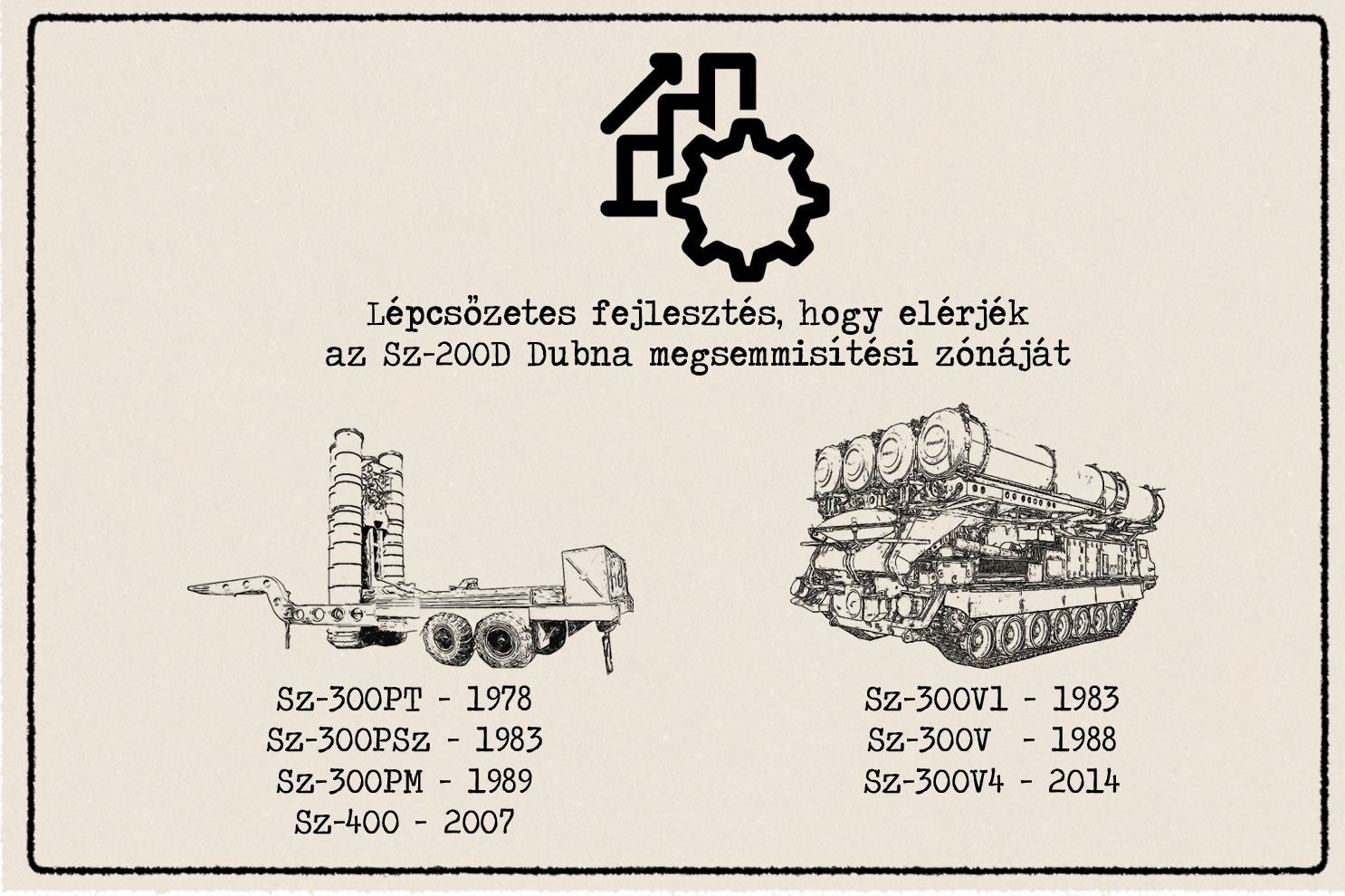
A történet vége az lett, hogy a hadsereg a repeszálló, lánctalpas, 300 kilométer hatótávolságú ballisztikus rakéta-elhárító képességgel rendelkező Sz-300V1 rendszere öt évvel később követte az Sz-300PT 1978-as hadrendbe állítását. A teljes képességű, Pershing-2 elfogására tervezett Sz-300V változat 10 évvel (!) később készült csak el, 1988-ban.
Ez még mind semmi, de végül még a Flotta is kijárta magának, hogy az Sz-300F, egyedi tűzvezető lokátort kapjon, mely nem csak a hajó billegését veszi figyelembe, de teljesen zárt is a korróziót okozó sós tengervízzel szemben. Sőt, még a rakéta tárolására szolgáló konténer sem lett végül csereszabatos a Honi Légvédelmével, noha benne tárolt a rakéta maga, ugyanolyan. A Sz-300 család három eltérő fejlődési ágánál lényegében csak az maradt közös, hogy mind szilárd tüzelőanyagú rakétát, digitális számítógépet és fázisvezérlésű lokátorokat használtak.
Az Sz-300 létezésének okai
A történet onnan indul amerikai szemmel nézve, hogy az Sz-200 légvédelmi rakéta-rendszer család megjelenésével nyilvánvaló lett, hogy a támadóeszközök sebességének és repülési magasságának további növelése értelmetlen. Reális műszaki és költségkereteken belül gondolkodva gyakorlatilag lehetetlen volt olyan gyors, ember vezette repülőgép építése, aminek pusztán a sebessége és repülési magassága megvédené az Sz-200-tól.

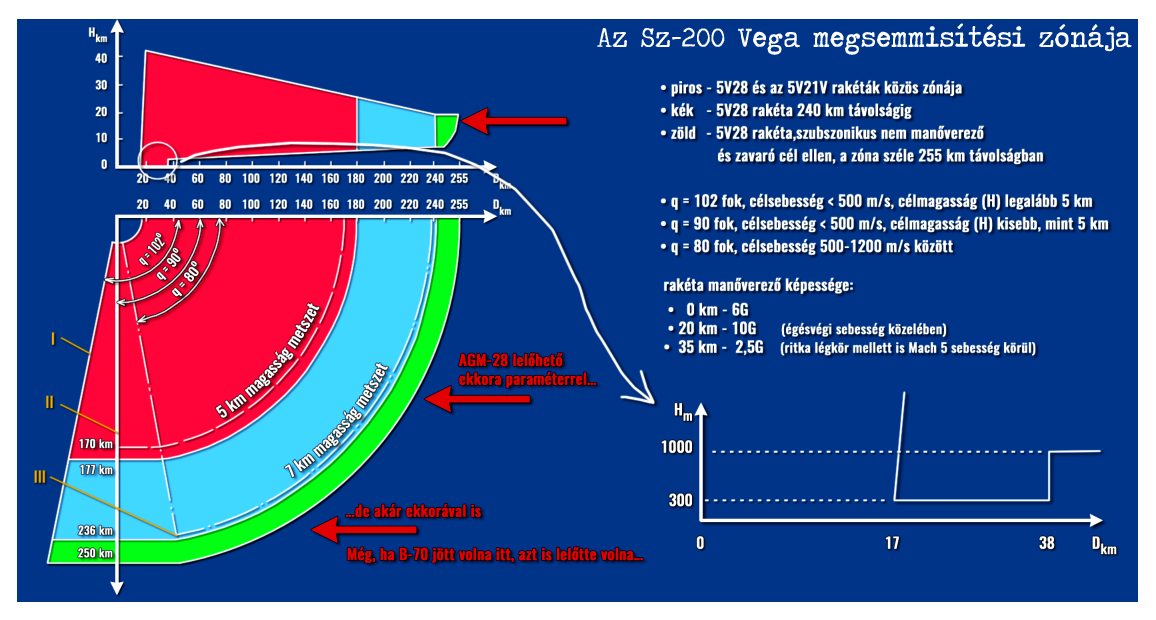
Első lépésben tehát a B-52 bombázók kaptak úgymond hosszabb lándzsát. A gravitációs bomba vagy bombák helyett a ’60-es évek elejétől megkapták az AGM-28 Hound Dog robotrepülőgépet, amiből kettő hordozása volt lehetséges a szárnyak alatt. A rakéta indítási távolsága elérte nagy magasságban az 1000 kilométert is, tehát messze az Sz-200 megsemmisítési zónáján kívül volt indítható, sőt még honi légvédelmi vadászokkal szemben is számottevően növelte a bombázó túlélési esélyeit.[2] Viszont az AGM-28 a körülbelül 2 Mach sebessége ellenére, még a Dvina és Volhov rendszerekkel is leküzdhető volt. Tehát minőségileg nem jelentett kihívást a Hound Dog, mint célpont. Kicsit fals analógiával élve a Mach 2 csúcssebességre képes B-58 ember vezette bombázó helyett, aminek nem kellett oda- és vissza is repülnie a célhoz, egy hasonló sebességű, de egyszerhasználatos eszközre cserélték le azt, ami így elfért már a B-52 szárnyai alatt.

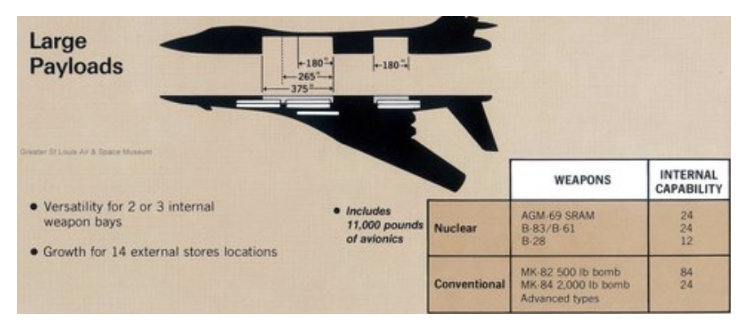
A ’60-es évek végén megjelent az AGM-69 SRAM, aminek lényegében egy levegőben indított kvázi-ballisztikus rakéta volt, ami képes volt közel ballisztikus, de akár végig kis magasságot tartva is repülni. Ebből a B-52 akár 20 (!) darabot is hordozhatott, de ennek hatótávolsága még nagyobb magasságban indítva is csak 200 kilométer volt. Ennek használata kismagasságú repüléssel és ugrással volt kombinálható a területvédelmi képességű Sz-200 rendszer áttörésére.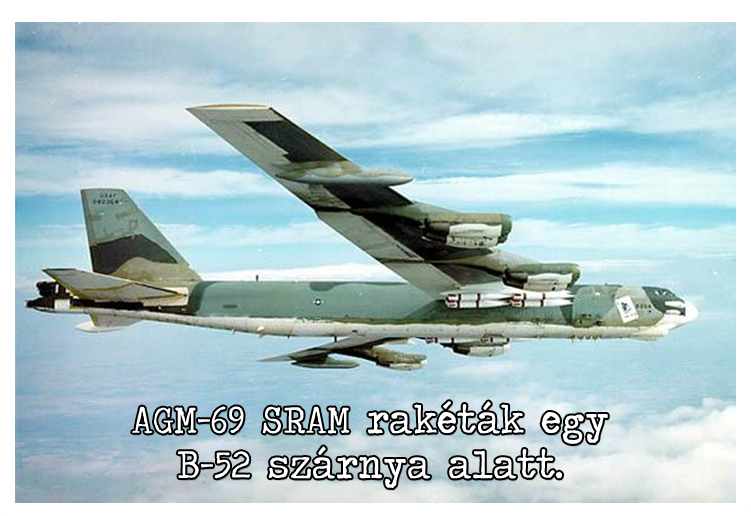

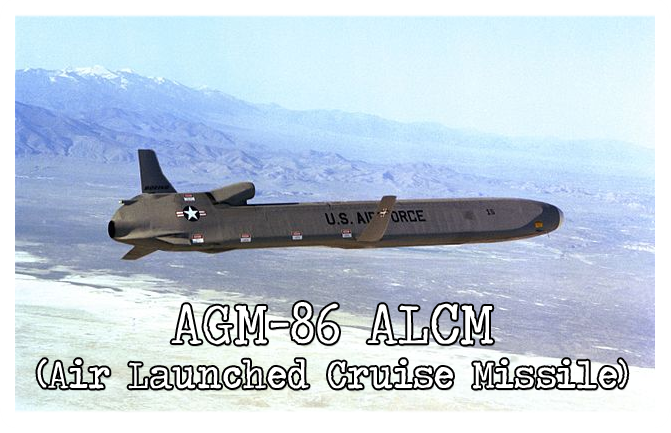
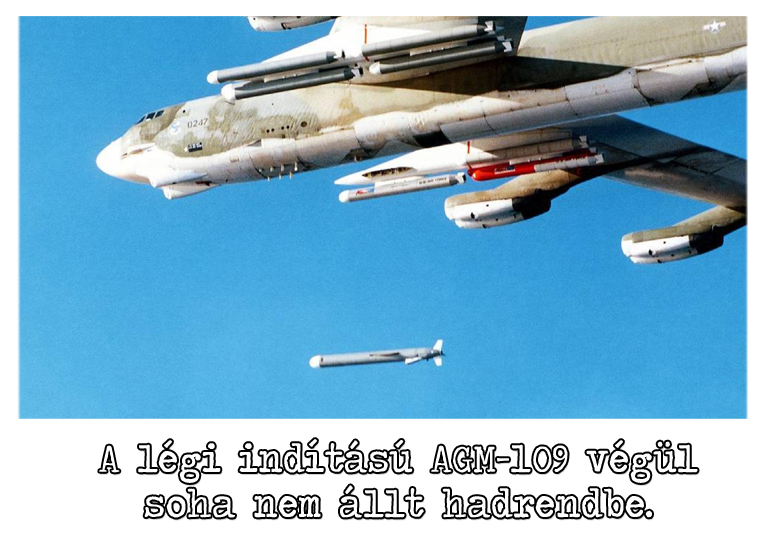
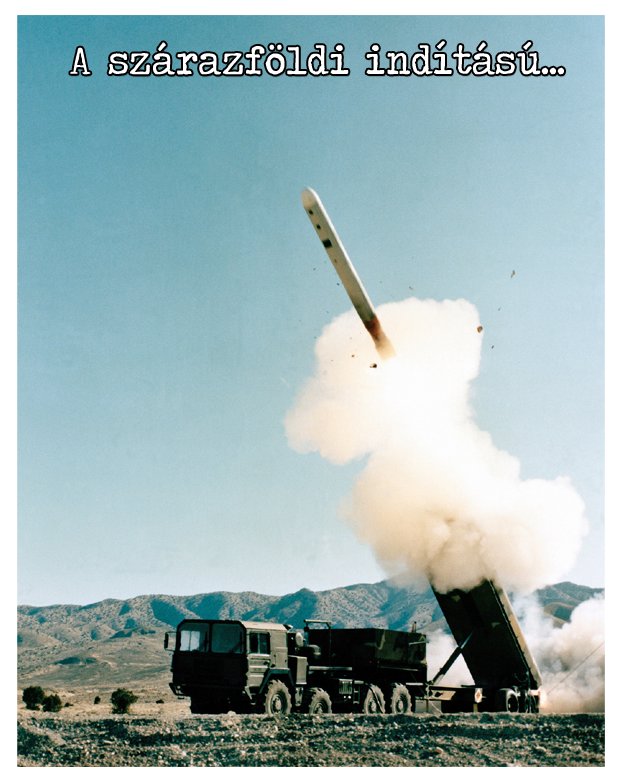
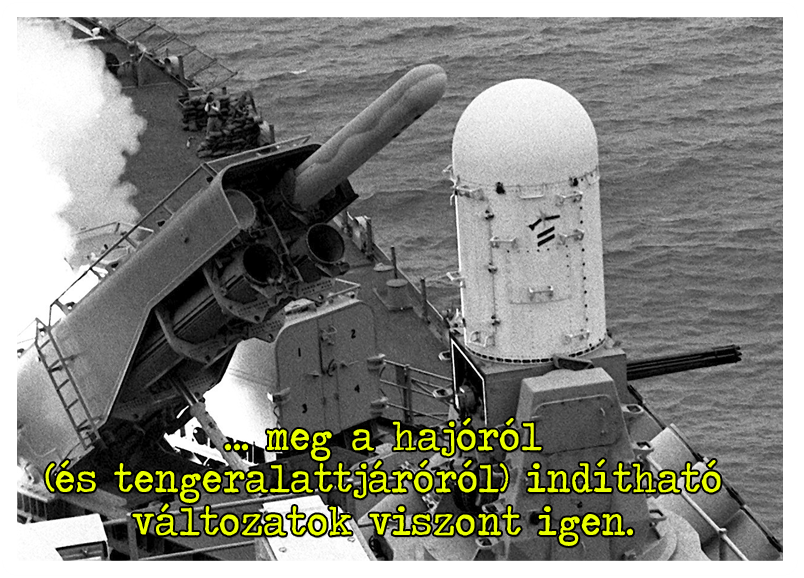
Végül a hidegháború „ultimate” megoldása a kisebb magasságon, nagyobb távolságról indítható és mondhatni okosabb eszközök megalkotása volt a sebesség növelése helyett. A ’70-es évek legvégén jelent meg a levegőből indítható AGM-86 ALCM, majd azt szorosan követve a hajóról és szárazföldről is indítható BGM-109, illetve tengeralattjáróról indítható UGM-109 Tomahawk. Az AGM-86 platformjai a régebbi B-52 és az új B-1B interkontinentális bombázók lehettek. Ezek a robotrepülőgépek az akkor forradalmian új TERCOM vezérléssel rendelkeztek, ami képessé tette őket robotpilótával teljesen autonóm, terepkövető, 30 méter magasan történő repülésre. A B-1B kis magasságon, 60 méteren, szintén terepkövető radar használatával közelítette volna meg a Szovjetuniót. A kimagasságú repülés miatt a manőverező robotrepülőgépek nem nagysebességű támadó fegyverek, maximális sebességük mindössze 800-850 km/h. Ha viszont ennyire lassúak, akkor mégis miért jelentettek mégis radikálisan más fenyegetést a korábbi fegyverekkel összevetve?

- A kisméretű robotrepülőgépek a méretükből adódóan 0,1 m2 (-10 dBsm) körüli, kis radarkeresztmetszettel rendelkeznek, ez nehezíti észlelésüket.
- Rendkívül kis magasságon, 30 méteren vagy sík terep felett repülve akár ennél alacsonyabban közelítik meg célpontjaikat. Ez nagyban behatárolja a légvédelmi rakéta-rendszerek megsemmisítési zónáját, hiszen a radarhorizont alatt repülő célokat nem képesek észlelni és azokra rakétát rávezetni. Ezen felül a közelségi gyújtók tervezésénél nem kis kihívás, hogy ennyire közel a föld- vagy vízfelszínhez közel is megbízhatóan működjenek.
A két manőverező robotrepülőgép típus indítási távolsága elérhette a 2000 kilométert, tehát ezek bőven a légvédelmi rakéta-rendszerek megsemmisítési zónáján kívül indíthatók. Ezek a támadóeszközök akár kerülő úton is képesek voltak elérni Moszkvát és a Szovjetunió területének nagy részét, az ismert légvédelmi pozícióktól biztos távolságot tartva, ahol csak lehetett. A Honi Légvédelem elfogó-vadászgépeinek kellett volna a robotrepülőgépek döntő részét lelőnie. A legjobb persze az lenne, ha még a bombázókat indítás előtt lelövik, de ez utóbbira az esély meglehetősen csekély volt. A területvédelmi koncepciót tehát nem az Sz-300P légvédelmi osztályok telepítése, hanem a MiG-31 Foxhound rendszeresítése jelentette.[3] A MiG-31 hadrendbe állítása azonban nem jelentette azt, hogy a MiG-31 őrjáratokon átjutó támadó fegyverekkel a honi légvédelemnek ne kellene foglalkoznia.

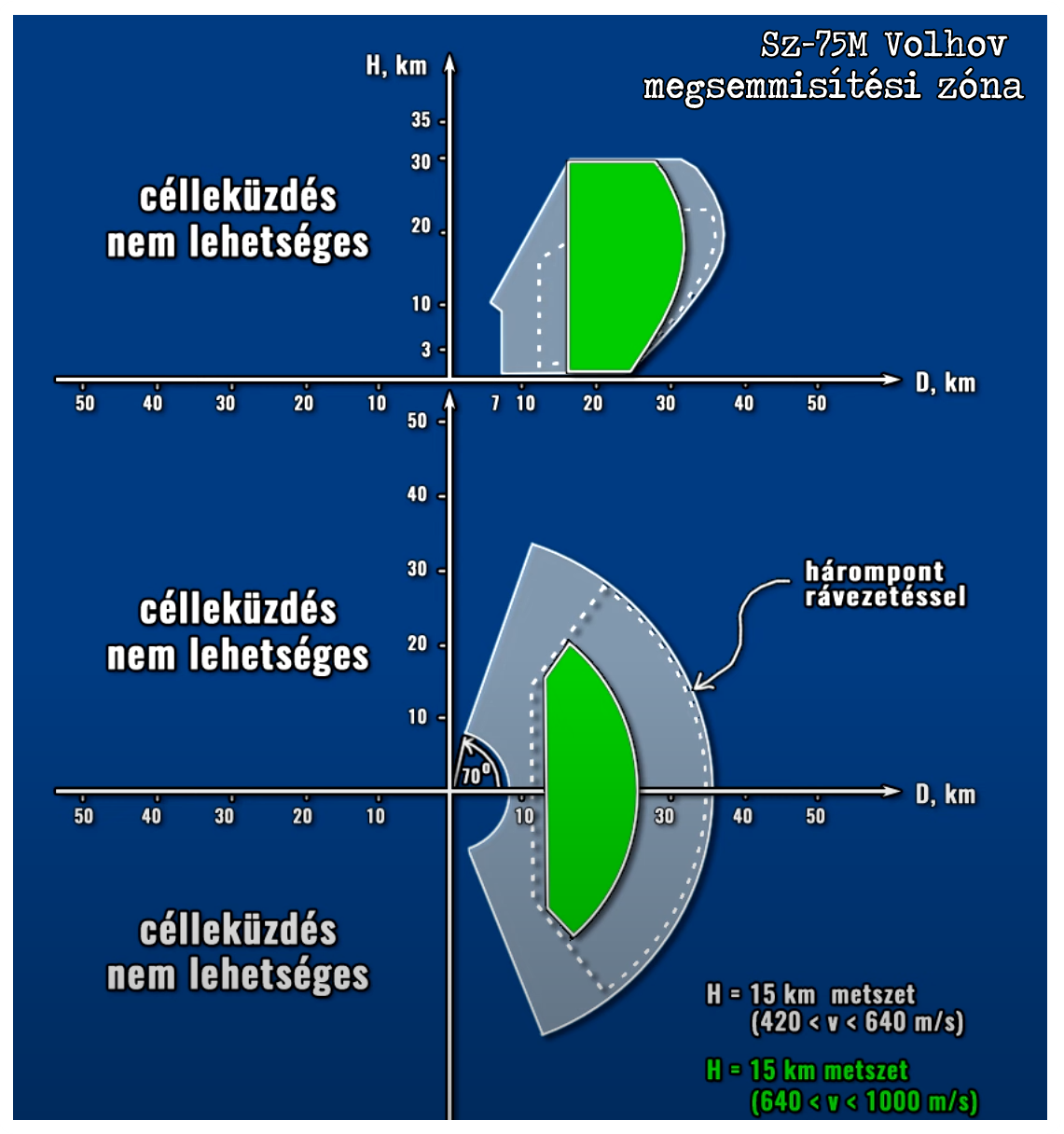
A terepkövető repülésre képes robotrepülőgépek megjelenésének a következménye, hogy az Sz-200 által, a korábbi, akár nagysebességű célok ellen biztosított területvédelemi képesség megszűnt. Az Sz-200 Vega rendszer még 1200 m/s, vagyis kb. négyszeres hangsebességű célok leküzdésére képes volt 180 kilométer távolságig. A terepkövető robotrepülőgépek hiába voltak ehhez képest csigalassúak, az extrém alacsony repülési magasságukkal gyakorlatilag az összes korábbi erőfeszítést lenullázták. Ugyanis, még ha meg is alkotnak egy olyan új légvédelmi rendszert, ami képes az ennyire alacsonyan repülő célokat is leküzdeni, akkor is, annak megsemmisítési zónájának nagyon komoly határt szab a radarhorizont. Idealizált esetben is csak 38 kilométer távolságban volt a zóna széle, hiába voltak a célok lassúak.
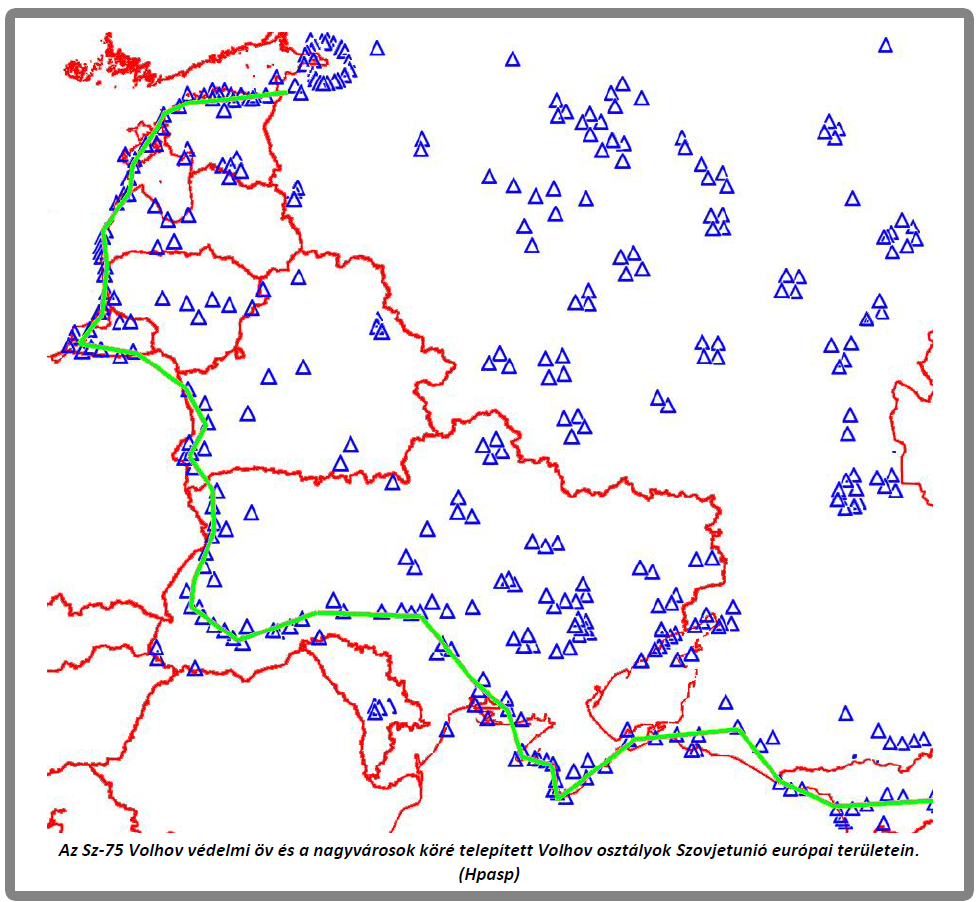
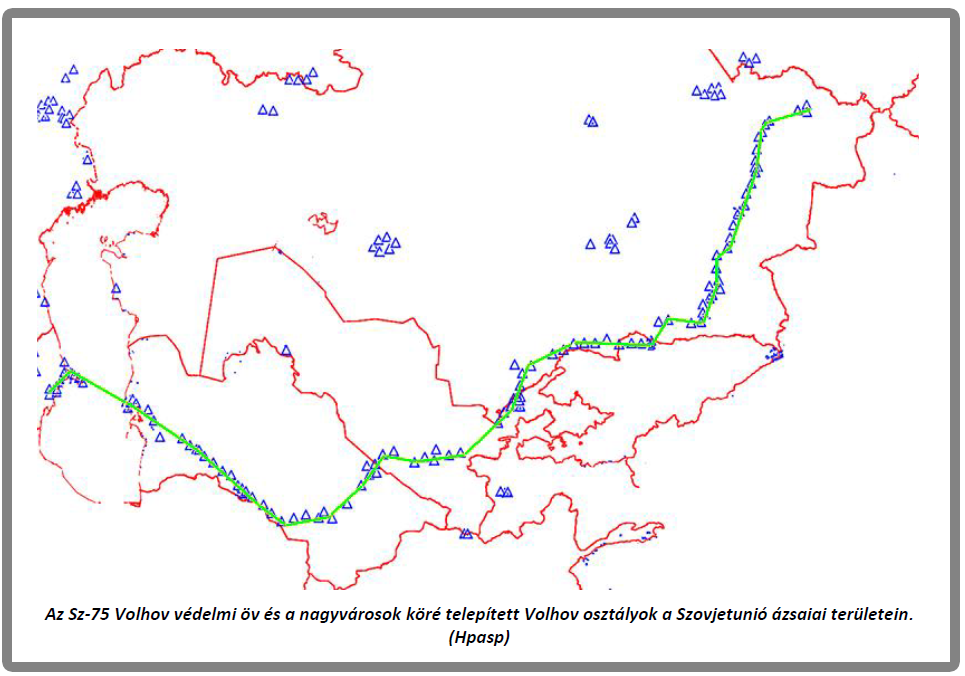
Tehát a védendő célokat körbe kellett telepíteni rakétaosztályokkal, hogy minden irányban biztosítva legyen a védelem, ahogy az korábban a Berkut, Volhov és Nyeva triónál szükséges volt. A nagy különbség, hogy nem a relatíve olcsó, hanem kb. egy nagyságrenddel drágább légvédelmi rendszerrel kellett ezt megvalósítani. A korábban Volhov komplexumokkal megalkotott 8 500 kilométer hosszú határ menti légvédelmi sáv lecserélése pénzügyi képtelenség lett volna, csak a már addig is védett városok és fontosabb katonai létesítmények védelménél váltotta le a Sz-75 és Sz-125 családot az Sz-300P család.
Egy B-52 bombázógép belső fegyvertérből 8, a szárnyai alól plusz 12, egy B-1B akár 16 db rakétát vagy robotrepülőgépet is indíthatott egymás után percek alatt. Tehát rengeteg bejövő céllal kellett számolni kis területen, nagyon rövid idő alatt. Manőverező robotrepülőgépekkel is célszerű egy ponton megkísérelni az áttörést, lehetőleg minimalizálva a rendelkezésre álló időablakot a megsemmisítésre. Még, ha elvi szinten a Nyevák tömeges telepítésével próbálták volna megoldani a feladatot, akkor is reménytelen vállalkozás lett volna. Lényegében ez az út vezetett el az Sz-300 iránti igényhez.
Az Sz-300P család tervezési alapja
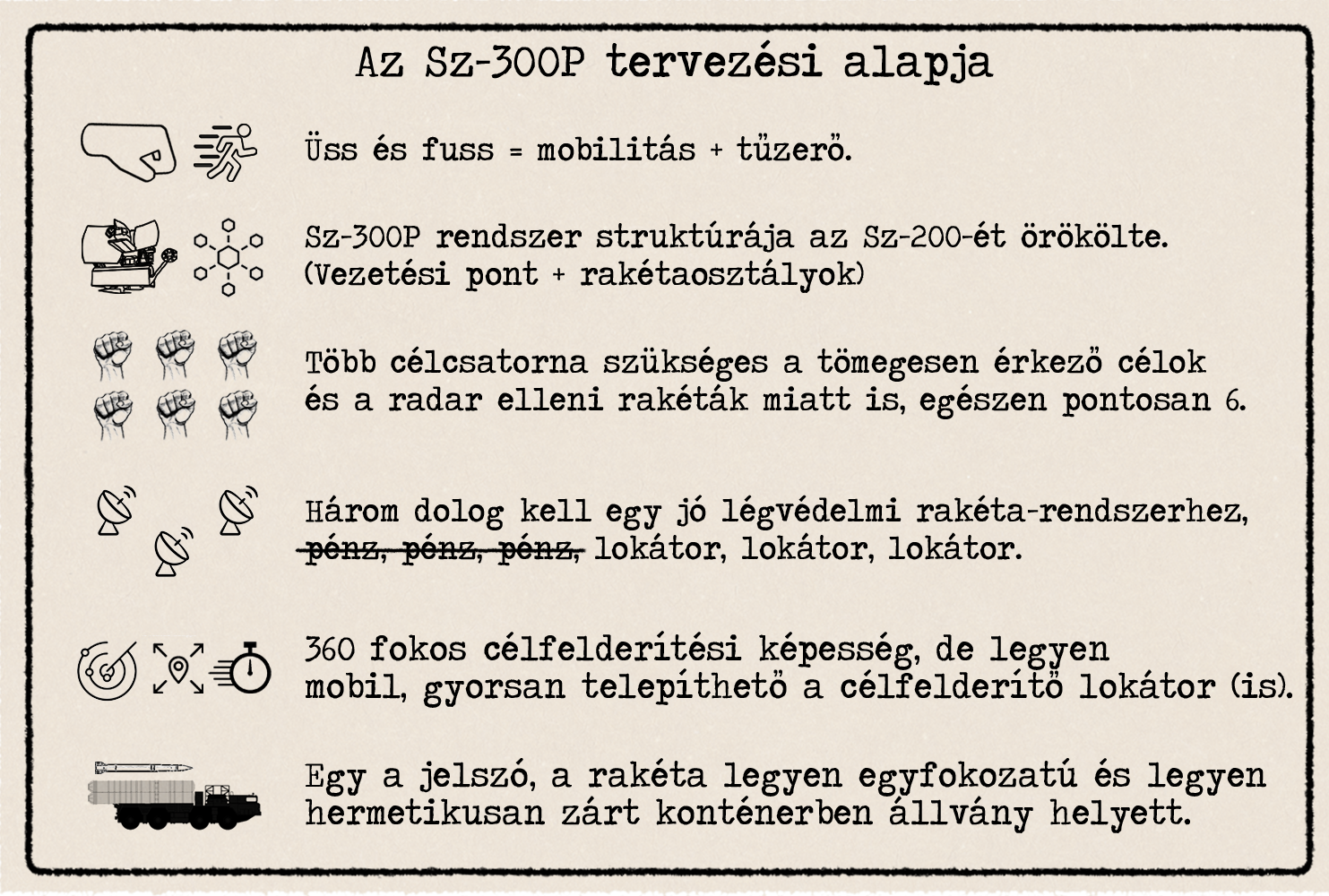
Az Sz-300P család fejlesztése során figyelembe vették a vietnámi tapasztalatokat is, amelyek összefoglalva a következők:
- Az ellenfélé a légifölény, cél egy terület (város) megvédése, de adott esetben az „üss és fuss taktika” használata is szükséges lehet, amit Vietnámban is alkalmaztak. Ez utóbbi inkább a testvéri és baráti országok és az USA közötti esetleges helyi konfliktusok esetén fordulhatott volna elő. A Varsói Szerződés országaiban, békeidőben jellemzően fix tüzelőállásokba települtek volna az Sz-300-asok, háború esetén viszont kitelepültek volna. Emiatt viszont önjáró, gumikerekes járművekre volt szükséges telepíteni a rendszer főbb elemeit.
Az Sz-300P részben az Sz-200 felépítését örökölte meg, csak itt a rakétaosztályok és a vezetési rendszer már nem fix telepítésű, hanem gumikerekes járművekre vagy utánfutókra lettek felépítve. A rendszer felé az eredeti elvárás 5 perces tűzkészültségi idő volt megállástól, de bizonyos korlátokkal, lásd majd később.
- Több célcsatorna szükséges a tömeges robotrepülőgépes támadás, de más miatt is. Ennek segítségével önvédelmi képesség a radar-elleni rakéták ellen megvalósítható, azok lelövése a kívánatos a folyamatos harctevékenység fenntartása mellett. Így nem szükséges olyan sokszor, vagy egyáltalán lekapcsolni a tűzvezető lokátort, mint az történt Vietnámban az AGM-45 Shrike rakéták miatt. Ezt a képességet a fázisvezérelt tűzvezető lokátor biztosította.
- Továbbra is többféle lokátor szükséges egy rakétaosztálynál:
- Minden rakétaosztály több célcsatornás saját rávezetőállomással, vagyis fázisvezérelt tűzvezető lokátorral kellett, hogy rendelkezzen.
- Minden rakétaosztály egy folyamatos hullámú, kismagasságon, 360 fokban felderítő radarral rendelkezett a terepkövető robotrepülőgépek miatt. Ezek felderítését a rakétaosztálynak magának kell megoldania. Egyetlen központi, több rakétaosztályt kiszolgáló lokátorral ez nem lehetséges, az osztályok közötti távolság miatt. Legyen bármekkora névleges felderítési távolsága egy lokátornak a radarhorizont és a domborzat korlátozza a felderítési távolságot kismagasságú célok ellen.
- Körkörös lefedettség közepes és nagy magasságon felderítő radarral, a már megszokott módon, de gyorsabb áttelepülési képességgel. Az Sz-200 örökségének tekinthető, hogy bár osztálycsoportotok nincsenek, de ennek ellenére egy Sz-300 ezred vagy dandár, csak egyetlen közös nagy hatótávolságú célfelderítő radarral rendelkezik, mint ahogy az Sz-200-nál a P-14F volt. Ez azt jelenti, hogy 2-6 darab rakétaosztály bír csak egy célfelderítő radarral, ami az ezred vagy dandár vezetési rendszerének a része.
- A rakétának egy fokozatúnak és szilárd hajtóanyagúnak kellett lennie.
- A rakéták állványok helyett immáron hermetikusan zárt konténerben kaptak helyet.
Az Sz-300P család felépítése
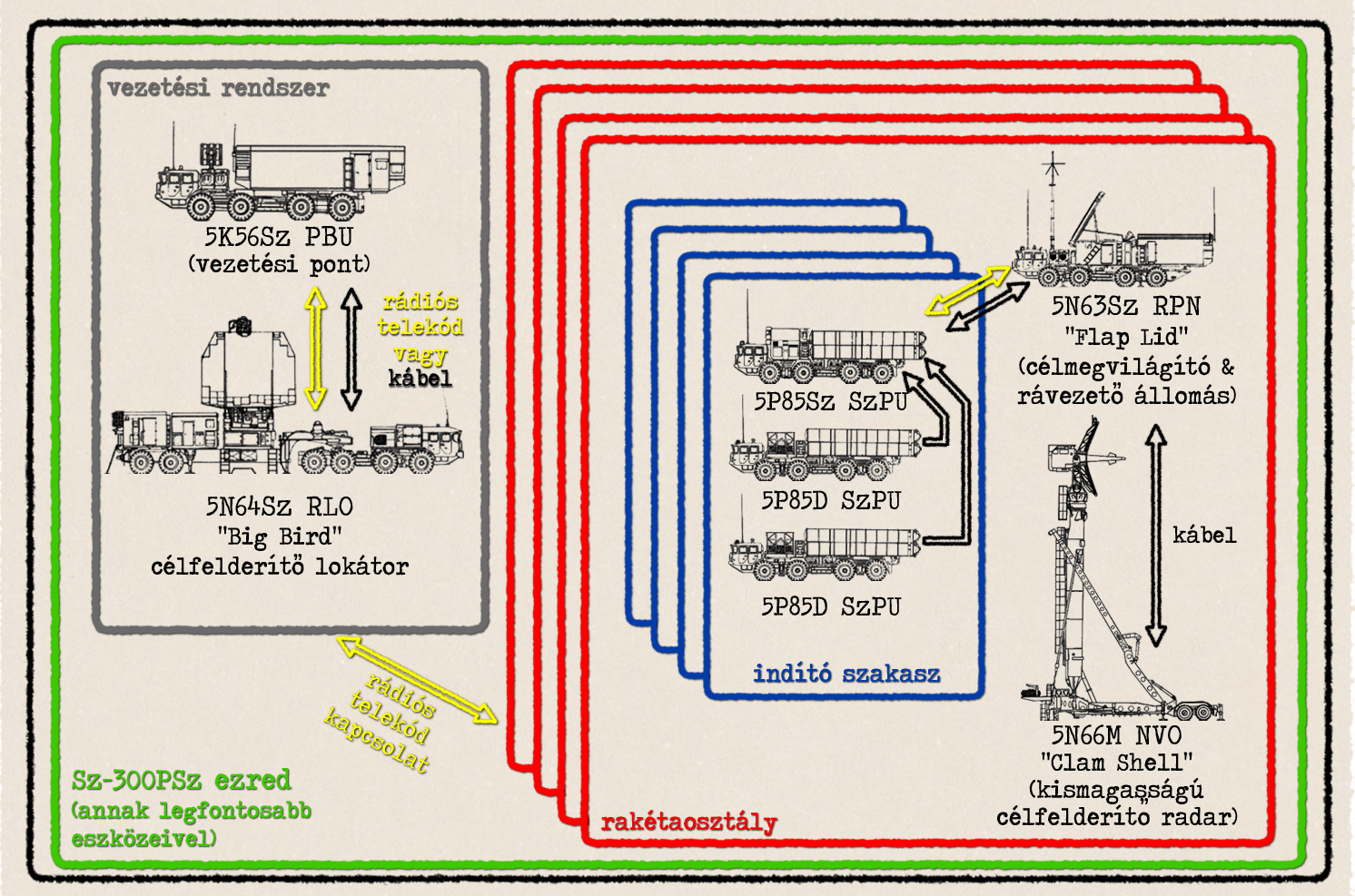
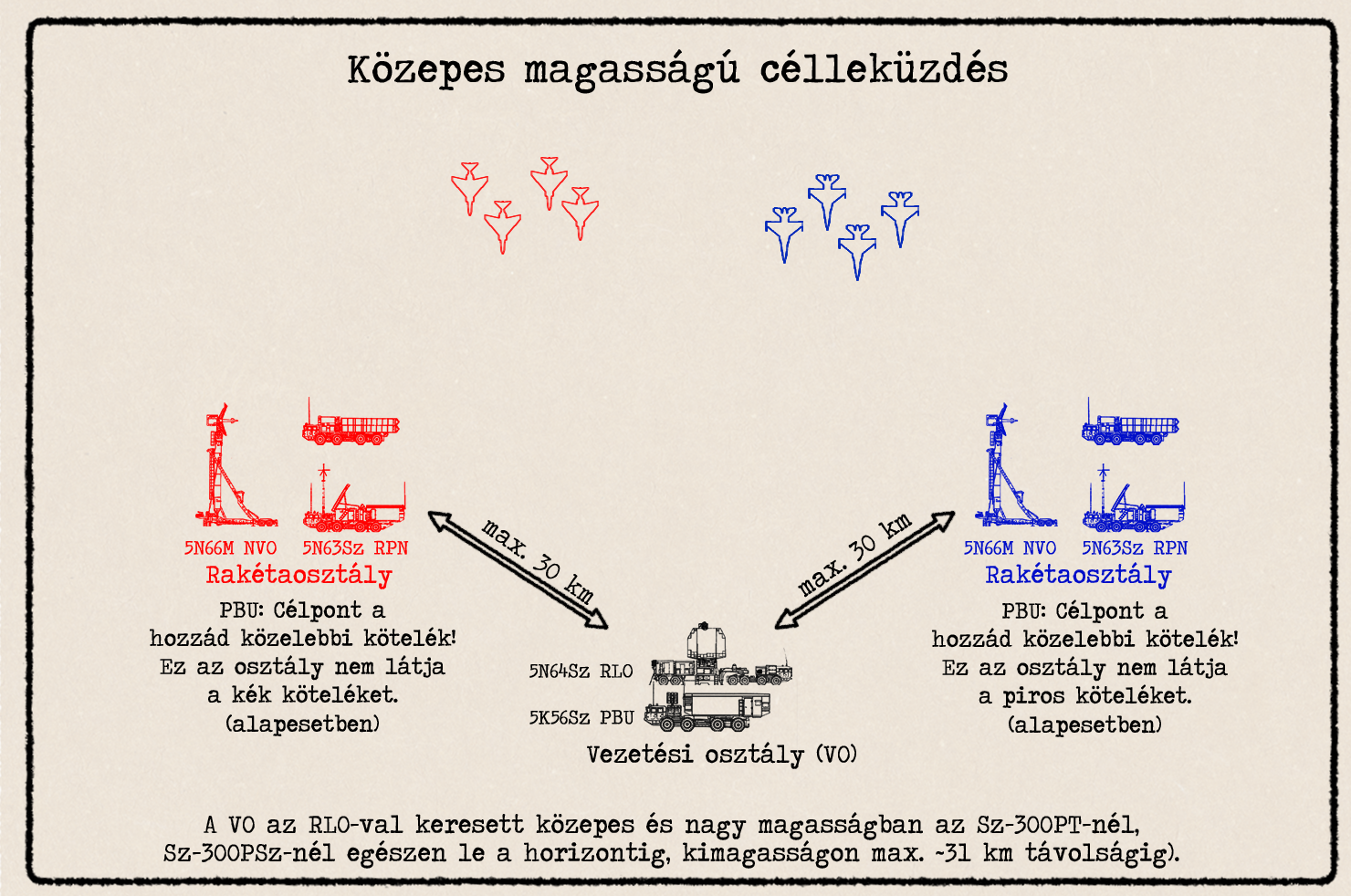
Az Sz-300P család működési elvének és képességeinek megértéséhez nyújt segítséget az ábra, amin egy 4 darab rakétaosztályos Sz-300PSz ezred látható, de csak a fő eszközeivel. A piros keretben levő rakétaosztály 4 darab indító szakasszal bír, ezek kék keretben vannak. 4 darab rakétaosztály és a vezetési osztály együtt alkot egy ezredet, ez van a zöld keretben. A logika azonos az Sz-300PT esetén is, csak a rakéta indítójárművek nem önjáróak, ahogy az RLO lokátor sem. Az összes Sz-300P változat, továbbá az Sz-400 is ezzel megegyező logikai felépítésű kisebb eltérésektől eltekintve, ettől csak az export Sz-300PMU változat tért el, de erre majd később térünk vissza. Mik a rendszer fő elemei?
- A vezetési rendszer egy körkörös célfelderítő lokátorból, illetve az ezred-dandár vezetési pontjából állt. A lokátor az 5N64 RLO , NATO kódnevén Big Bird, a vezetési pont, az 5K56 PBU.
- A vezetési osztály 2-6 darab közötti rakétaosztály szolgált ki, ami két lokátorral rendelkezett. Az egyik lokátor a körkörösen, kismagasságon felderítő 5N66 NVO típus, NATO kódnevén Clam Shell, ami egy mobil toronyra volt telepítve. A másik lokátor a célmegvilágító és rávezető állomás, az 5N63 RPN, NATO kódnevén Flap Lid.
- Minden egyes rakétaosztály négy indító szakasszal bírt, minden szakasz 3 darab vontatható vagy önjáró rakétaállványból és egy F3 kabinból állt, ami ezeket kezelte. A PSz változat indítói voltak önjáróak.
Jól jegyezzük meg a lokátorok 3 betűs rövid neveit, mert a továbbiakban az egyszerűség kedvéért már csak ezeket fogjuk használni. Tehát a két célfelderítő lokátor RLO és az NVO, a rávezetőállomás az RPN.
A tervezési követelményeknek megfelelően az Sz-300P rendszer rakétaosztályai légvédelmi ezredekbe vagy dandárokba tagozódtak be. Egy ezredet legfeljebb 4 darab rakétaosztály + 1 darab vezetési rendszer, egy dandárt 5 vagy 6 darab rakéta osztály + 1 db vezetési rendszer alkotott.
Mielőtt részletesebben megismerkednénk az Sz-300P rendszer főbb elemeivel szükséges képbe kerülni annak fejlesztési és telepítési körülményeivel. A terepkövető robotrepülőgépek által jelentett fenyegetés olyannyira sürgetővé tette az új légvédelmi rendszer hadrendbe állítását, hogy az eredeti tervekkel ellentétben egy kevésbé mobil, utánfutókra szerelt változatának telepítését kezdték meg 1978-ban, ez volt az Sz-300PT változat, NATO kódnevén SA-10A.

1978 és 1985 között a 86 példányban gyártott, a hat célcsatornás, közepes hatótávolságú Sz-300PT légvédelmi rakétakomplexum Moszkva körül egy az egyben váltotta le Sz-25 Berkut rendszert 56 darab rakétaosztály telepítésével. A maradék 30 rakétaosztály pedig öt fontosabb város (Minszk, Gorkij, Dnyipropetrovszk, Novoszibirszk, Riga), és két hajógyár (Szeverodvinszk és Nyikolajev) légvédelmét egészítette ki. Mivel vontatott járművek voltak, emiatt az 5 perces helyett a korábbi komplexumhoz hasonló 2 órás telepítési idő volt csak elérhető.

Az Sz-300PT-t követő változat az 1983-tól 1991-ig gyártott mobil Sz-300PSz Volhov-M6, NATO kódnevén az SA-10B változat volt. Ez a variáns valószínűleg a nyugati hírszerzés megtévesztésére kapta a Volhov nevet, az Sz-75M-hez semmi köze sem volt. A 140 darab legyártott rakétaosztályból 20 darab Leningrád köré települt 5 ezredbe szervezve. A maradék kb. 110 darab rakétaosztály a fontosabb településeknél váltotta le az Sz-75/125 légvédelmi rendszereket, településenként általánosan néhány rakétaosztály települt.


A legszembetűnőbb változás laikus szemmel a PT változathoz képest, hogy a rakétaindító konténerek önjáró járműre kerültek, ahogy az tűzvezető lokátor is. Viszont a kismagasságú- és az vezetési rendszer célfelderítő lokátora méretükből kifolyólag továbbra is vontatott alvázon maradtak. Viszont ezeket településkor sem kapcsolták szét, mert az aggregátor a vonató járművön volt, azok egy egységet képeztek. Mivel a közúthálózaton való közlekedés képessége elvárt volt, ezért a félpótkocsis megoldást választották egy, túlméretes alvázzal szerelt konstrukció helyett. Mind a vezetési rendszer, mind a rakétaosztályok rendelkeztek geodéziai bemérő gépkocsival, hiszen az osztályok a terepre is kitelepülhettek, nem csak fix tüzelőállásokba, mint például Moszkva körül.

A PSz változat alapvető felépítése és képességei kitelepült állapotban, azonos rakéta esetén nem tértek el különösebben a PT változattól, a fő jellemzőik, a megsemmisítési zóna, célsebesség stb. ugyanazok voltak. Valójában ez érte el az eredetileg tervezett első Sz-300P változat műszaki tartalmát az új, önjáró járművekkel, ami szükséges volt a rövidebb telepítési időhöz.
Az Sz-300PT változatnál minden jármű kábelesen csatlakozott a rakétaosztályon belül egymáshoz, csak a vezetési rendszer vezetési pontja és a rakétaosztályok között volt telekód rádió kapcsolat. Moszkva környéki tüzelőállásoknál lehetséges, hogy a vezetési pont és a rakétaosztályok között is volt kábeles kapcsolat az Sz-25 Berkut rendszer örökségeként.
Az Sz-300PSz változatnál az vezetési rendszeren belül a RLO célfelderítő lokátor és a PBU vezetési pont között telekód rádió vagy vezetékes kapcsolat állt rendelkezésre. A vezetési pont és a rakétaosztály RPN rávezető lokátor között telekód rádiós kapcsolattal rendelkezett. A rakétaosztályon belül az NVO és az RPN kábelen, az RPN és az indító szakaszonként egy fő indítóállvány (5P85Sz), rádióval vagy vezetékkel is kapcsolódhatott egymáshoz. Viszont az indító szakasz két segédindítóállványa (5P85D) és a fő állvány csakis kábelesen kapcsolódhatott egymáshoz.
A vezetési rendszer
Az Sz-300PT és PSz rendszereknél az ezred/dandár vezetési rendszere kiemelkedő fontossággal bír a rakétaosztályok harcképességét és üzemét nézve. Az 5N83Sz vezetési rendszer a következő főbb elemekből állt:


- 1 db 5N64 RLO (Big Bird) célmegjelölő rádiólokátor (F6, F7, F8 kabinok)
- 1 db 5K56 PBU ezred vezetési pont (F9 kabin)
A rakétaosztályok számára a kismagasságú zóna felett, közepes és nagy magasságban a vezetési osztály RLO (Big Bird) radarja deríti fel és jelöli ki a célokat normál üzem esetén. Az vezetési ponton jelölik ki és továbbítják a célok koordinátáit megsemmisítésre a rakétaosztályok felé. Fontos, hogy közepes és nagy magasságban, ha nem folytatnak önálló célfelderítést az RPN-nel, akkor rakétaosztályok csak az megsemmisítésre kijelölt célokat látják, azon kívül semmi mást. A vezetési pont nem képes a teljes légi helyzetkép megosztására a rakétaosztályokkal. Az ezred/dandár vezetési pontja fél-automatizált üzemű, az operátor számára rangsorolja a célokat, és optimális lokációjú osztályt ajánl a célmegsemmisítéséhez.
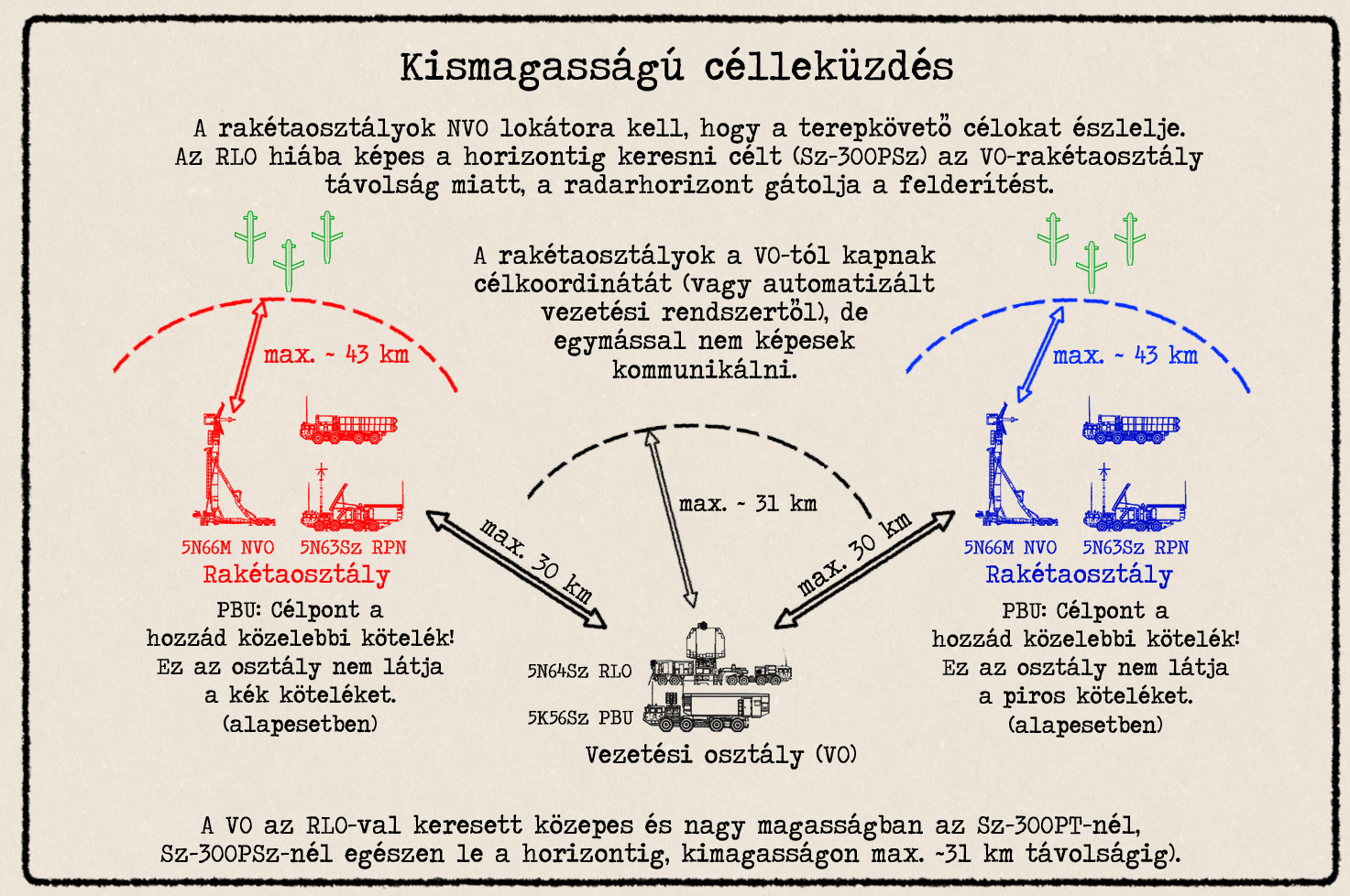
Mivel a rakétaosztályok a vezetési rendszer körül települnek, legfeljebb kb. 25-30 kilométer távolságban, hiába képes terepkövető célok felderítésére az RLO is a S-300PSz változatnál, a radarhorizont korlát miatt minden rakétaosztálynál szükséges marad az NVO. Egész egyszerűen az RLO a radarhorizont miatt nem képes a rakétaosztályokhoz képest kellő távolságban észlelni a terepkövető célokat, ezért kell a rakétaosztálynak saját magának felderíteni azokat.
A fentiekből következik, hogy a vezetési rendszer RLO radarja nélkül rakétaosztályok közepes- és nagymagasságú helyzetkép-alkotó képessége korlátozott. Az RPN és NVO radarok nem arra lettek tervezve, hogy az osztályok körül teljes légtérben hajtsanak végre önálló célkutatást. Az NVO fizikailag is képtelen a terepkövető célok feletti zónában keresni, hiszen annak nyalábszélessége csak 1 fok, hiába forog nagy sebességgel. Az RPN pásztázási sebessége viszont meg messze elégtelen ahhoz, hogy belegyezze a légteret a szükséges oldalszög és helyszöggel, ahogy ezt majd a későbbiekben látni fogjuk.
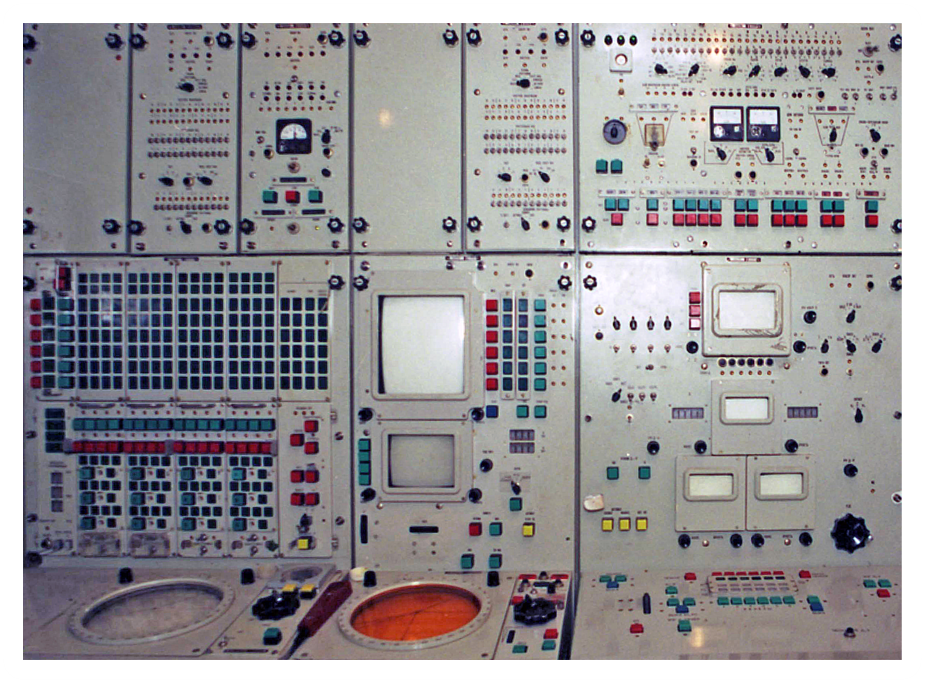
Az ezred/dandár vezetési pont, három munkaállomás található egymás mellett. Itt történik a légi helyzetkép értékelése és célok átadása az rávezető állomás felé.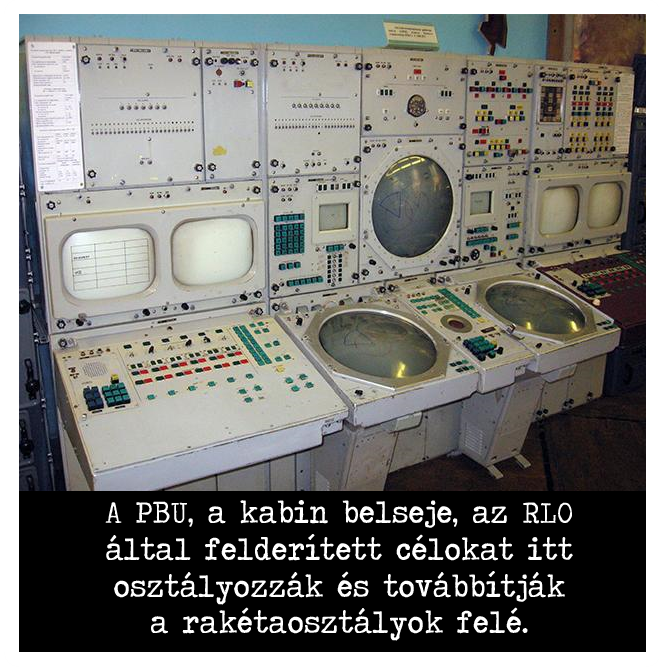
 A vezetési ponton több munkaállomás van, egy vezetési pont mind a 6 darab rakétaosztály számára képes céladatokat szolgáltatni. A vezetési pont képes a szomszédos vezetési rendszertől digitális kapcsolaton keresztül adatokat kapni. A rakétaosztályok azonban csak a saját vezetési rendszerrel voltak kapcsolatban, ezért még az ezreden vagy dandáron belüli rakétaosztályok sem tudtak egymással céladatokat megosztani. Minden rakétaosztály számára az RLO lokátor betervezése túlzás lett volna, megengedhetetlenül drágává tette volna a rendszert.
A vezetési ponton több munkaállomás van, egy vezetési pont mind a 6 darab rakétaosztály számára képes céladatokat szolgáltatni. A vezetési pont képes a szomszédos vezetési rendszertől digitális kapcsolaton keresztül adatokat kapni. A rakétaosztályok azonban csak a saját vezetési rendszerrel voltak kapcsolatban, ezért még az ezreden vagy dandáron belüli rakétaosztályok sem tudtak egymással céladatokat megosztani. Minden rakétaosztály számára az RLO lokátor betervezése túlzás lett volna, megengedhetetlenül drágává tette volna a rendszert.
Az Sz-300 rendszer lokátorai
5N64 RLO, a Big Bird lokátor család
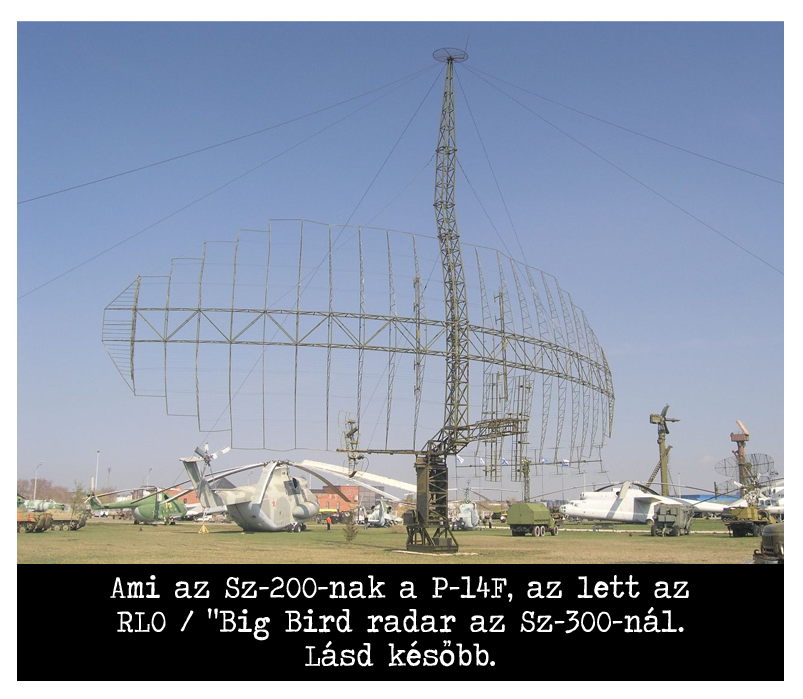
Az Sz-75 és Sz-125 rendszerekhez képest az Sz-300PT és a PSz abban térnek el, hogy csak az ezred/dandár vezetési rendszere rendelkezett nagy hatótávolságú, körkörös közepes és nagy magasságon felderítő radarral. Ezt a célt szolgálta az 5N64 RLO. A lokátor közepes és nagy magasságban repülő célok, illetve a Lance és Sergeant típusú ballisztikus rakéták felderítésére tervezték.

Az RLO által felderített adatokat az ezred/dandár vezetési rendszerén keresztül (5K56 PBU, F9 kabin) továbbítja a rakétaosztályok felé, a vezetési ponton jelölik ki a célokat közepes és nagy magasságban normál üzem esetén. A fentiek nem jelentik azt, hogy egy rakétaosztály ne tudna önállóan célt keresni, de erre csak korlátokkal képes az RPN tűzvezető lokátorral, lásd később.
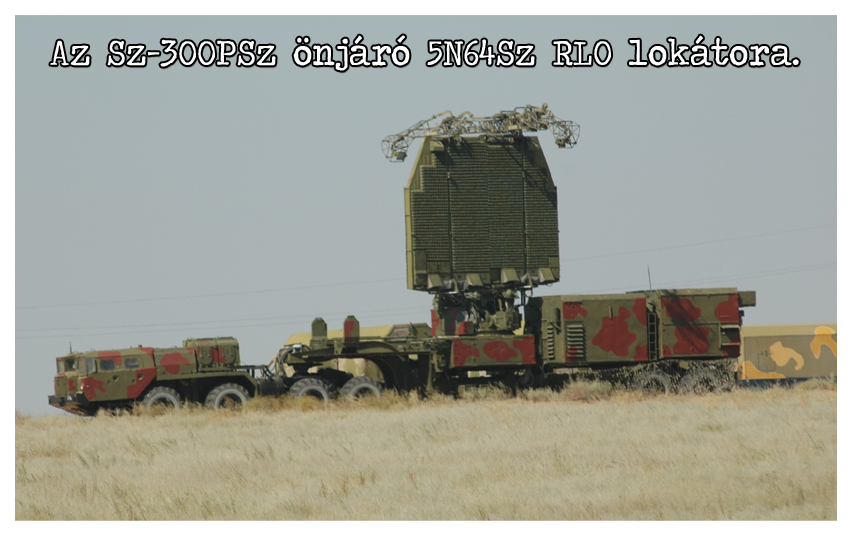
Az RLO három változatban készült, az első, az 5N64K konténeres változat 1978-tól. A radarhorizont közelében kismagasságon repülő célok felderítésére is alkalmas, digitális SzDC üzemmóddal felszerelt 5N64KV változat 1981-től, illetve az önjáró 5N64Sz változat 1983-tól került gyártásba a PSz változat számára.
Az RLO telepítése menetből, illetve bontás ideje az 5N64K és 5N64KV változatnál 2 óra, az 5N64Sz változatnál ez 5 percre (!) csökkent. Mindhárom lokátor típus bekapcsolás ideje telepített helyzetben 3 perc. Az 5N64Sz esetén mindhárom rész MAZ-7410-9988 típusú utánfutóra van telepítve, amit egy MAZ-7410 jármű vontat. A RLO részei a következők:
- F-6 kétoldalas fázisvezérelt antennarács és forgatószerkezet,
- F-7 adó vevő kabin
- F-8 feldolgozó és vezérlő kabin


Az F-8 kabin a PT változatnál még külön konténerben volt, a lokátor antenna viszont már tárolási állapotból kicsomagolta magát az első változatnál is, tehát nem volt szükséges daruzás, mint az Sz-75 és Sz-125 rendszerek rávezetőállomásainak telepítésénél és bontásánál. Az Sz-300PSz változatnál mind a három fő egység egyetlen utánfutón kapott helyet.
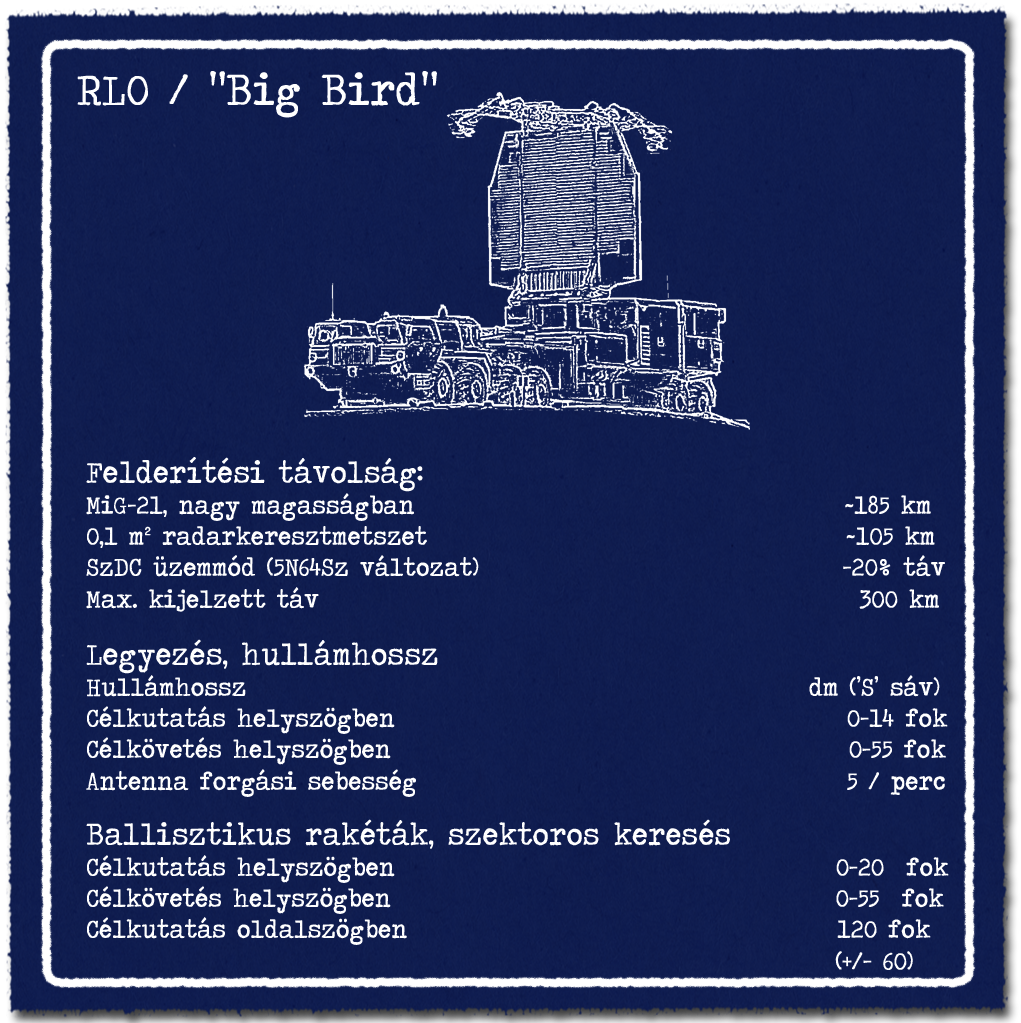
Az RLO felderítési távolsága MiG-21 méretű cél ellen közepes és nagy magasságban 185 kilométer. 0,1 m² radarkeresztmetszetű terepkövető robotrepülőgép ellen kb. 105 kilométer volt, amennyiben terepviszonyok, lehetővé tették az észlelést. Ehhez a lokátornak magasabban kell lennie, mint a cél, hiszen a radarhorizont kb. 31 kilométer távolságban van sík terep esetén is. Az SzDC üzemmódot érdekes módon a nagy távolságú célfelderítés tette szükségessé. 180 kilométer távolságban a relatíve alacsonyan és a közepes magasságon repülő célok alig a horizont felett vannak, tehát azok felderítésekor is zavaró tényező a földről visszaverődő jel. Az SzDC üzemmód ára a 20%-kal kisebb észlelési távolság, de legalább már a horizont széléig leért a keresési tartomány. A lokátor kijelzett maximális távolsága 300 kilométer, a maximális célmagasság 50 kilométer. Az RLO a deciméteres hullámhossz tartományban üzemelt, az „S” hullámsávban.
A Big Bird radar egyedi jellemzője az, hogy valójában kettő antenna-rendszerből áll. Az antenna szerkezet egyik oldala pásztázza a légteret új célok felderítéséhez, míg a másik oldala a felderített célok követésbe vételéhez szükséges második mérést végzi, így csökkentve az új célok követésbe vételéhez szükséges időt. Helyszögben, tehát fel-le irányokban a legyezés elektronikusan történik, tükrös reflektoros fázisvezérelt antennarács (a továbbiakban FAR) elven működik az RLO. Két oldalról egy-egy tölcsérsugárzó világítja meg a reflektív és egymástól független passzív fázisvezérelt antennarácsokat mindkét oldalon, miközben forog körbe az antenna. A körbeforgás idejéhez képest sokkal rövidebb idő alatt a FAR radar helyszögben (fel-le irányokban) végigtapogatja a tűnyalábokkal a légteret. Oldalszögben (balra-jobbra, körkörösen) tehát mechanikus pásztázású a radar, helyszögben elektronikus nyalábeltérítéses. Az antenna forgási sebessége 5 fordulat/perc, tehát minden 12. másodpercben frissült a légi helyzetkép, legfeljebb 300 kilométer távolságig. A lokátor NATO kódneve a lokátor kinézetére utal, ami bizonyos szögből egy szárnyait széttáró madárra emlékeztet.
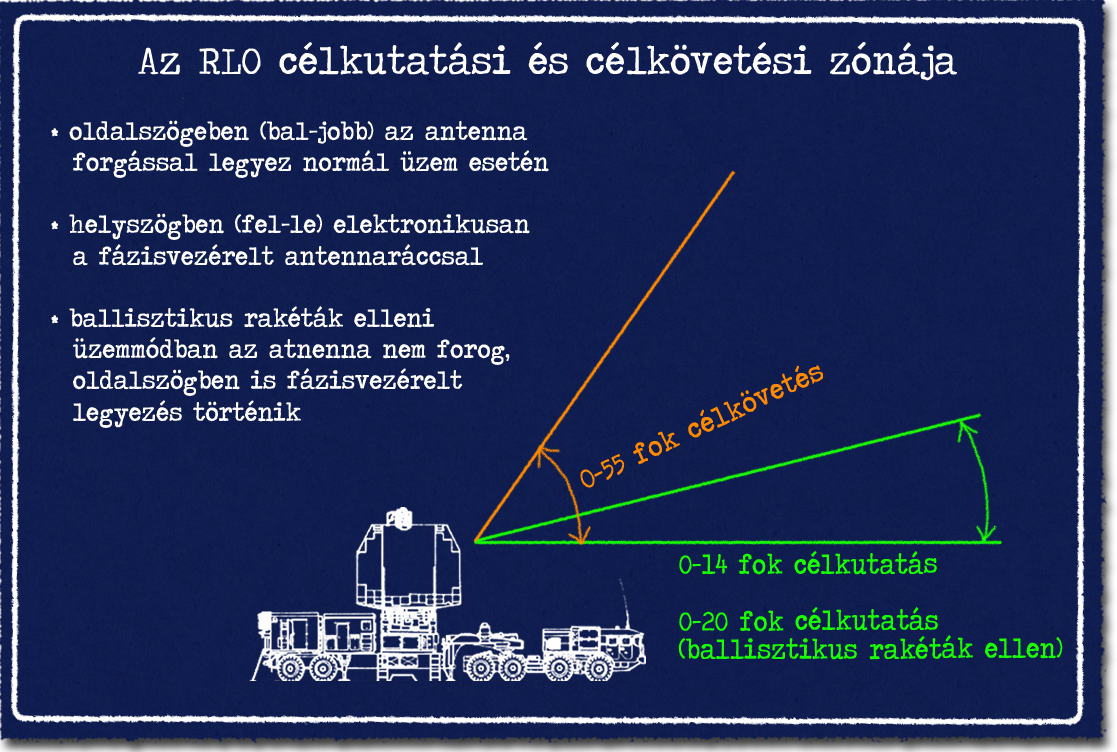
Repülőgépek felderítésekor helyszögben a lokátor 0 és 14 fok között keres célokat, de a már megtalált és követésben levő célokat akár 55 fokos helyszögig is követheti. Tehát alapvetően nagy távolságon a horizont közelében keresett célt, de ha a célpont egészen közel repült, akkor sem vesztette el a célkövetést.
Amennyiben ballisztikus rakéták felderítése volt a feladat, akkor az RLO egy fix oldalszögön állt, tehát csak szektoros keresésre volt alkalmas, egy adott irányból várta a rakétákat. Oldalszögben ekkor 120 fokban, helyszögben 0-20 fok között keresett célt, lényegében a horizont alól emelkedő rakéták felderítése volt a feladat. A már követett célokat 55 fokos helyszögig volt képes követni. Az RLO tehát szektoros keresésben már oldalszögben is elektronikusan legyezett.
A lokátor célfelderítéskor koherens kvázi-folyamatos, cél követéskor frekvenciában lineárisan modulált kvázi-folyamatos hullámformákat használ. Az állócélok kiszűrése 5N64KV és 5N64Sz típusnál digitális SzDC üzemmóddal történik.
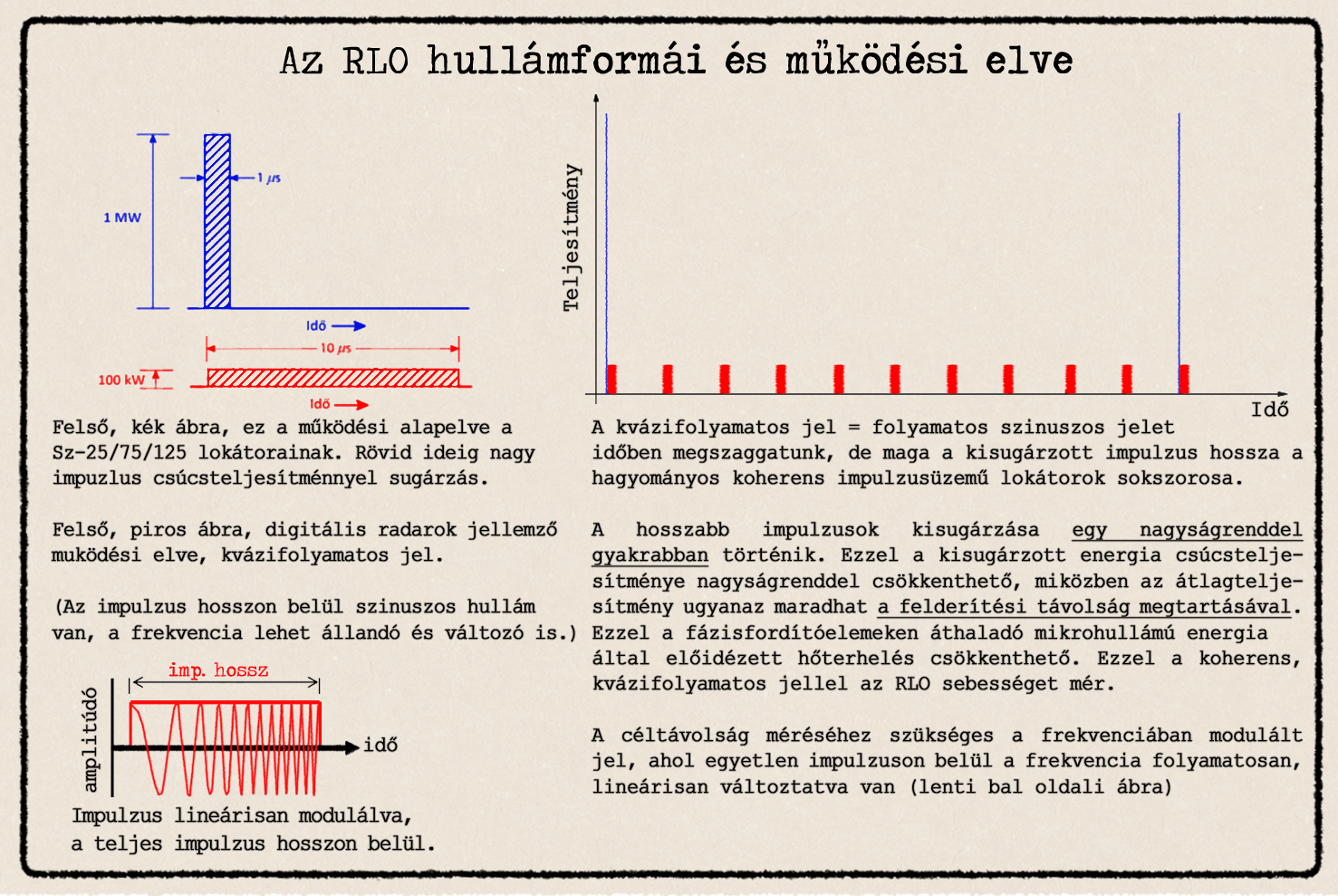
A kvázifolyamatos jel azt jelenti, hogy egy folyamatos szinuszos jelet időben megszaggatunk, de maga a kisugárzott impulzus hossza a hagyományos koherens impulzusüzemű lokátorok sokszorosa, és ezeknek a hosszabb impulzusoknak a kisugárzása egy nagyságrenddel gyakrabban is történik. Ezzel a kisugárzott energia csúcsteljesítménye nagyságrenddel csökkenthető, miközben az átlagteljesítmény ugyanaz maradhat a felderítési távolság megtartásával. Így a fázisfordítóelemeken áthaladó mikrohullámú energia által előidézett hőterhelés csökkenthető. A céltávolság méréséhez szükséges a frekvenciában modulált jel, ahol egyetlen impulzuson belül a frekvencia folyamatosan, lineárisan változtatva van.
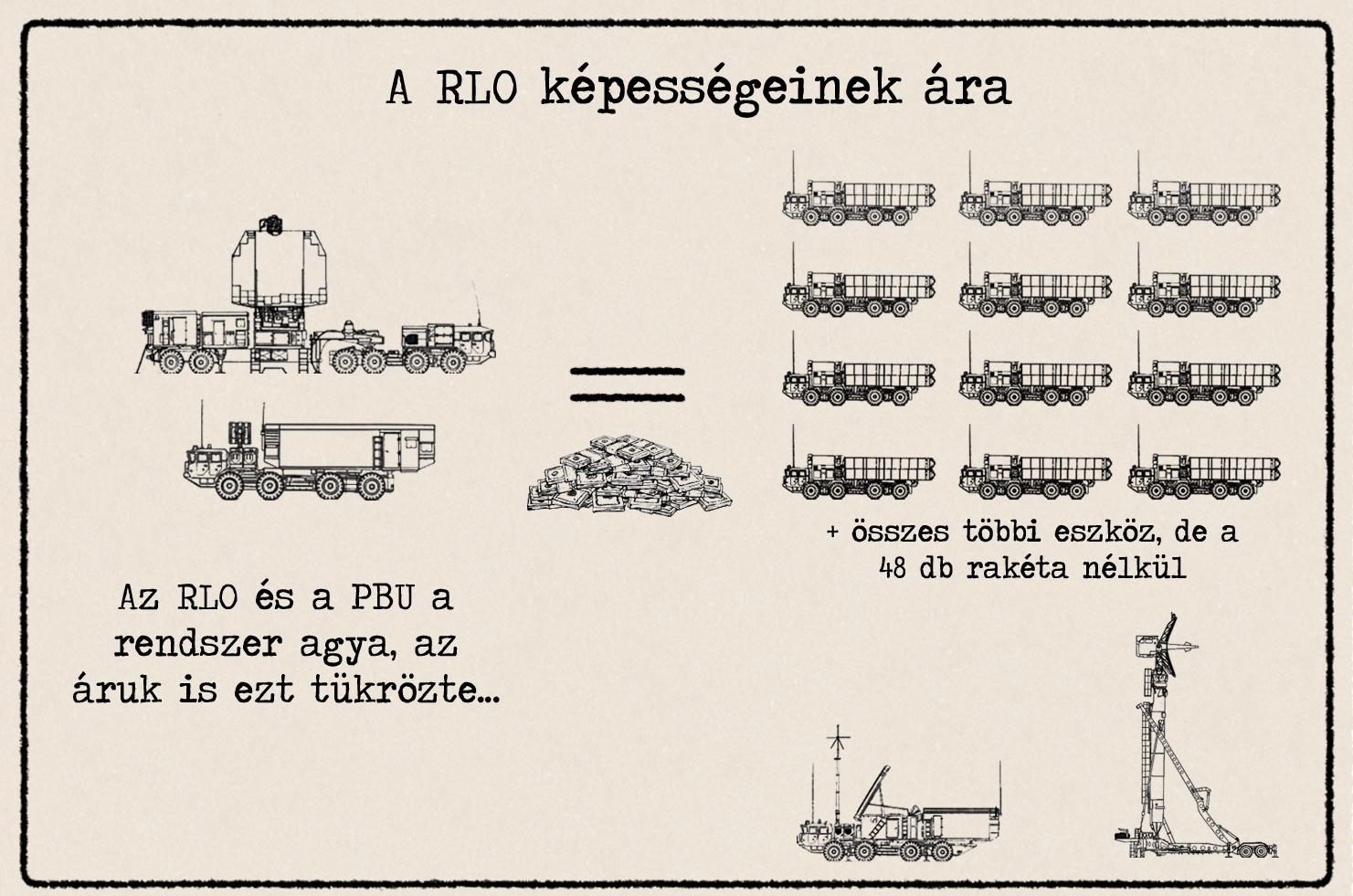
A Big Bird univerzalitása és paraméterei viszont annyira drágává tették a vezetési rendszert, főleg a hatalmas, két oldalas fázisvezérelt lokátor miatt, hogy a vezetési rendszer két járműve annyiba került, mint a teljes rakéta osztály, rakéták nélkül.
5N66M NVO, Clam Shell
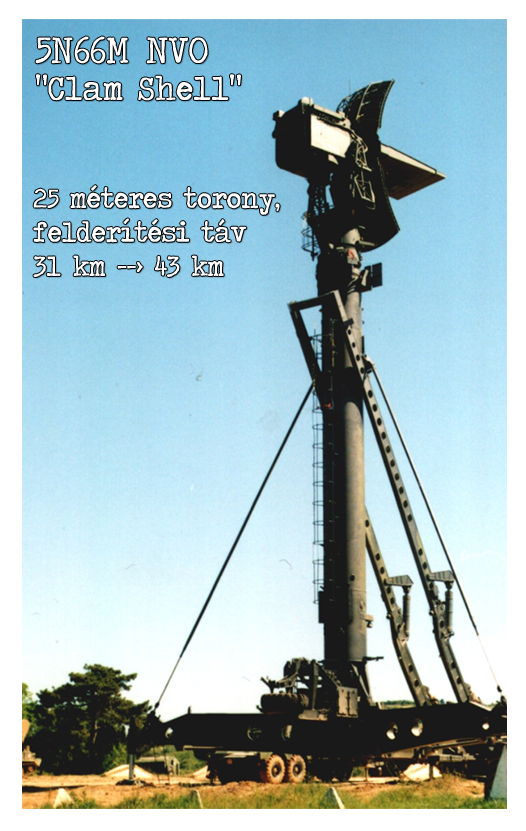
Az alacsonyan közeledő robotrepülőgépek felderítésére a harci osztályok egy külön kismagasságú, körkörösen pásztázó, folyamatos hullámú célfelderítő radarral rendelkeztek. Ez volt az 5N66M NVO, NATO kódnevén Clam Shell lokátor. A NATO kódnév választáskor itt sem hazudtolták meg magukat nyugaton, az antenna kagylóhéj formából származtatható a név.

Mivel a kismagasságú célok ellen a radarhorizont nagyban korlátozza a felderítési távolságot, ezért ez a radar magas állványra volt telepítve. Érdekes módon az NVO-t eredetileg nem is az Sz-300P rendszerhez kezdték fejleszteni, de mégis, a kismagasságú képesség elengedhetetlen részévé vált végül. A típusjelzésében ezért van az „M” betű, mert már eleve egy módosított változat volt az Sz-300PT igényeinek megfelelően.
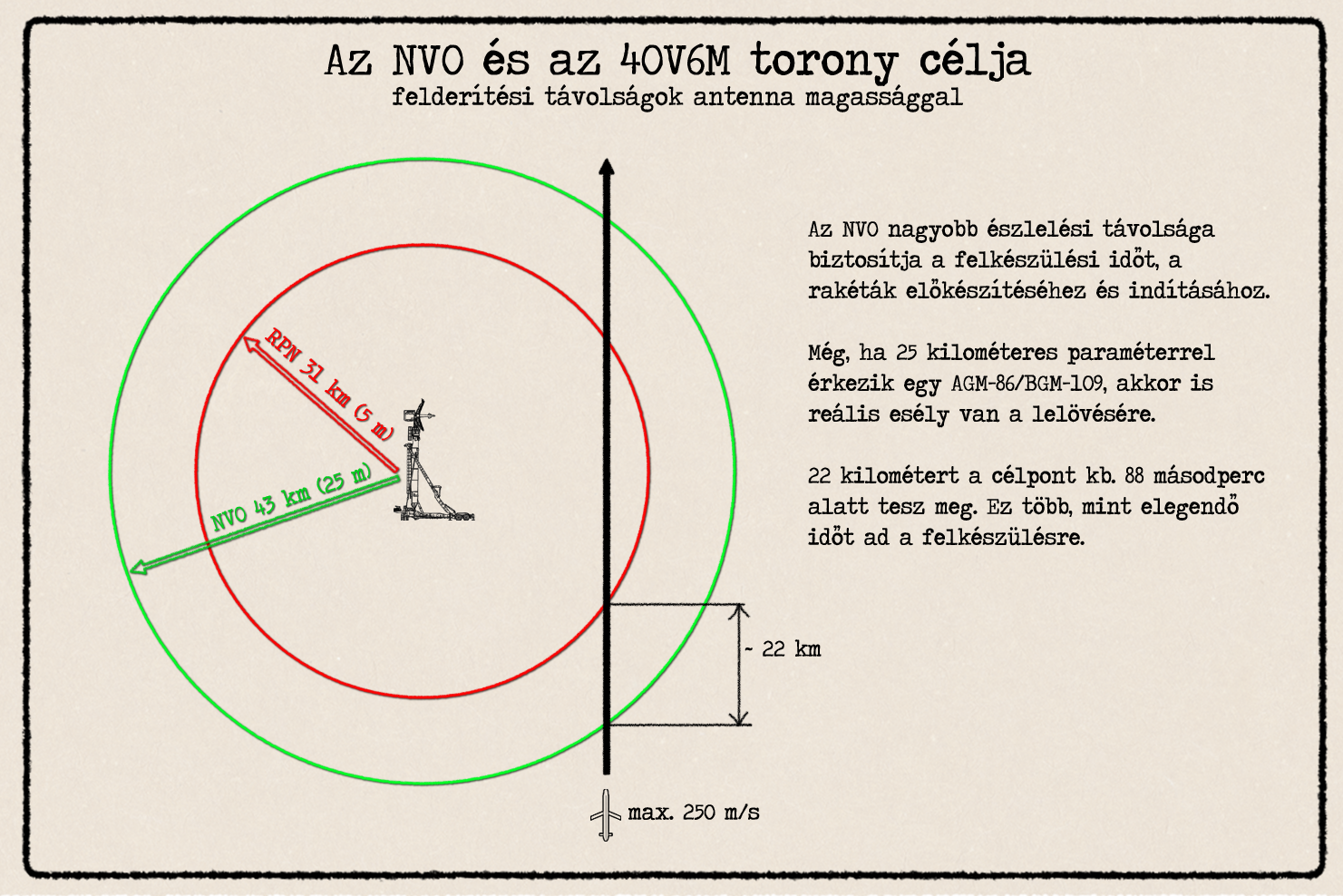
A lokátor különlegessége, hogy egy 25 méter magas tornyon kapott helyett, ez volt a 40V6M (vagy F10) típusjelzésű eszköz. Erre azért volt szükség, hogy a terepkövető robotrepülőgép észlelése minél korábban lehetséges legyen. A lokátor megemelésével egy 5 méter magasan levő antennához képest 30 méteren repülő célokkal számolva 31 kilométerről nagyjából 43 kilométer távolságra tolja ki tökéletesen sík terep esetén a radarhorizontból adódó maximális kismagasságú felderítési távolságot. Ez nem tűnik nagy különbségnek, de a nagy paraméterrel érkező célok esetén ez számottevően meghosszabbítja megsemmisítésre rendelkezésre álló időt. Az NVO pont annyival korábban érzékeli a célt, hogy mire torony nélküli tűzvezető lokátorral is észlelhetővé válik a távolság csökkenésével, a horizont alól előbukkanó cél, addigra a rakéta indításhoz szüksége előkészületek végrehajthatók és a célbefogást követően azonnal indíthatók a rakéták.

A lokátor a folyamatos hullámú üzeme miatt nagyon hasonlít az Sz-200 rendszer folyamatos hullámú célmegvilágító lokátorára az RPC-re, csak az antennák 90 fokban el vannak forgatva a dedikált feladatkörnek köszönhetően. A torony tetején található maga az antenna szerkezet és a szükséges berendezések. Felül található az adó antenna, alul a vevő. Az egész szerkezet össztömege, amit a torony tart könnyed 11 tonna. A lokátorantenna mögötti doboz mérete összemérhető egy Kraz teherautó vezetőfülkéjének méretével, tehát nem egy kis és könnyű berendezésről van szó, amit a toronynak kell tartania, miközben a lokátorantenna még nagy sebességgel forog is rajta.

Az NVO antenna forgási sebessége 20 fordulat percenként, tehát 3 másodpercenként frissült a kismagasságú légi helyzetkép. Az antenna nagy forgási sebessége jól mutatja, hogy mennyire fontos volt a reakcióidő csökkentése. A lokátor csak közeledő célok felderítésére alkalmas, nem volt szempont, hogy már távolodó robotrepülőgépeket derítsenek fel. Azokat addigra már úgyis követnie kellett a tűzvezető lokátornak, ha távolodó célokra kellett tüzelni. A közeledő célokat monokromatikus folyamatos hullámú jellel észleli, távolság mérése itt is lineáris frekvencia-modulációval történik, mint a Sz-200 RPC-jének esetében.

A lokátor helyszögben egy fokos nyalábot állít elő, hiszen csak a kismagasságú célok felderítése a cél. A maximálisan kijelzett céltávolság 120 kilométer, 15 darab cél követésére képes a rendszer. Az átlagos adóteljesítmény 1,4 kW. Viszonyításképpen, ez fele az Sz-200 Vega rendszer RPC célmegvilágító lokátorához képest. Az NVO a „C” sávban, tehát a centiméteres hullámhossz tartományban üzemelt.
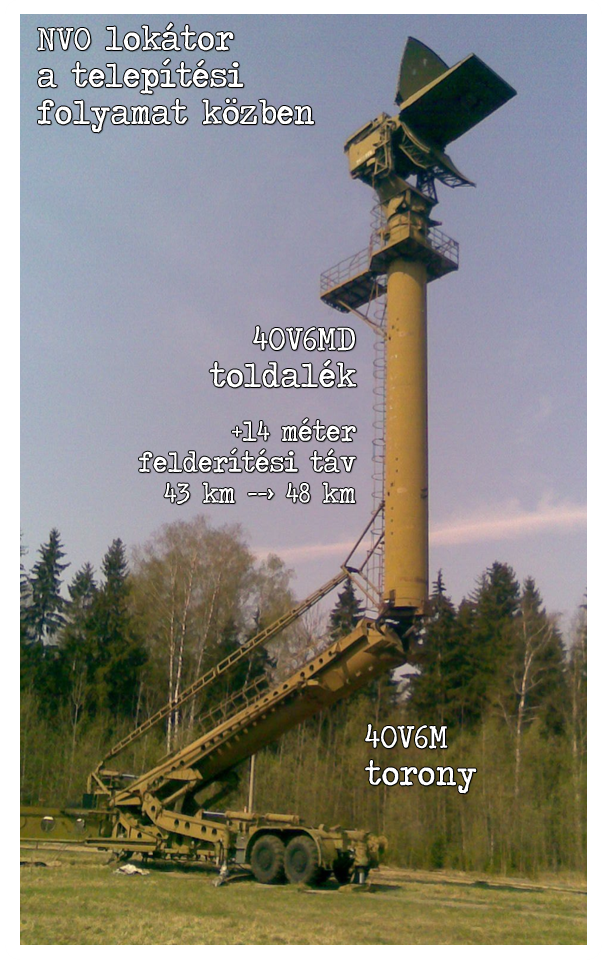
Az NVO – és igazából az RPN számára is – a ’80-as évek közepétől elérhetővé vált a 40V6MD torony. Ez valójában nem egy új tornyot jelent, hanem egy új toldalék elemet, amitől az antenna magasság 25 méterről 39 méterre nő, a felderítési távolságot sík terepen 48 kilométerre növelve.
5N63 RPN, Flap Lid
Ha az RLO, Big Bird lokátor mondhatni a rendszer agya, akkor az 5N63 RPN, NATO kódnevén Flap Lid lokátor a rendszer ökle. A lokátor neve a „felhajtható kupak” szintén a lokátor fizikai sajátosságból ered. A tárolási és az üzem közbeni állapot között hidraulikus munkahengerek vizuálisan hasonlóan tolják ki az antennát, ahogy pl. egy kulacs feldele felnyílik.


A PT változatnál a célmegvilágító- és rakéta-rávezető rádiólokátor (F1 kabin) egy külön utánfutón kapott helyet. Ez a radar mechanikus legyezés helyett már elektronikus nyaláb-eltérítést használ oldal- és helyszögben is, tehát passzív, átmenő típusú fázisvezérelt antennarács (FAR) elven működő radar volt. Az antenna szerkezet elforgatható 360 fokban körkörösen.
A lokátor fázisvezérelt antennarács elven való működése elengedhetetlen volt a több célcsatornás képességhez, amennyiben egyetlen lokátorral szükséges megvalósítani a célmegvilágítást és a rakéták követését. Mi a lényege a FAR elven működő tűzvezető lokátornak? Hogy a gyors egymásutánban formált tűnyalábok oldal- és helyszöge tetszőleges lehet. Tehát, ha már rávezető állomás számára a célfelderítő lokátor megadta a célok irányát, távolságát és akár sebességét is, akkor a tűzvezető lokátornak csak a célpontok környezetét kell letapogatnia, ezzel is megvalósul a folyamatos célkövetés. A légtér többi része a rakéta rávezetés szempontjából nem számít, ezért azt belegyezni sem szükséges, ha a célkeresésről más lokátor gondoskodik.
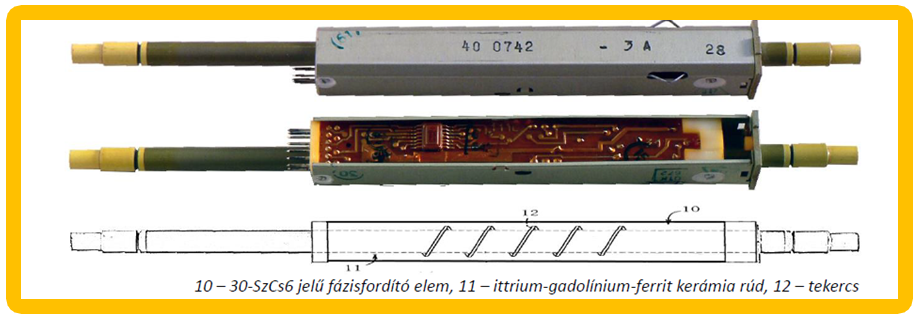 A fázisvezérelt antennarács azon az elven működik, hogy egy adó által sugárzott elektromágneses hullámot elektronikusan térítik el fázisfordító elemek segítségével. A 30-SzCs6 jelű fázisfordítóelemben található ittrium-gadolínium-ferritkerámia rúd megváltoztatja a rajta áthaladó mikrohullámú energia áthaladási sebességét a tekercsben indukált mágneses térerősség függvényében. Az ezzel elért hullám interferencia jelenségnek köszönhetően térül el a nyaláb iránya, ahova a teljesítmény döntő része esik.[4] Minden fázisfordító elemet egyenként, digitálisan vezérelnek.
A fázisvezérelt antennarács azon az elven működik, hogy egy adó által sugárzott elektromágneses hullámot elektronikusan térítik el fázisfordító elemek segítségével. A 30-SzCs6 jelű fázisfordítóelemben található ittrium-gadolínium-ferritkerámia rúd megváltoztatja a rajta áthaladó mikrohullámú energia áthaladási sebességét a tekercsben indukált mágneses térerősség függvényében. Az ezzel elért hullám interferencia jelenségnek köszönhetően térül el a nyaláb iránya, ahova a teljesítmény döntő része esik.[4] Minden fázisfordító elemet egyenként, digitálisan vezérelnek.
![]()
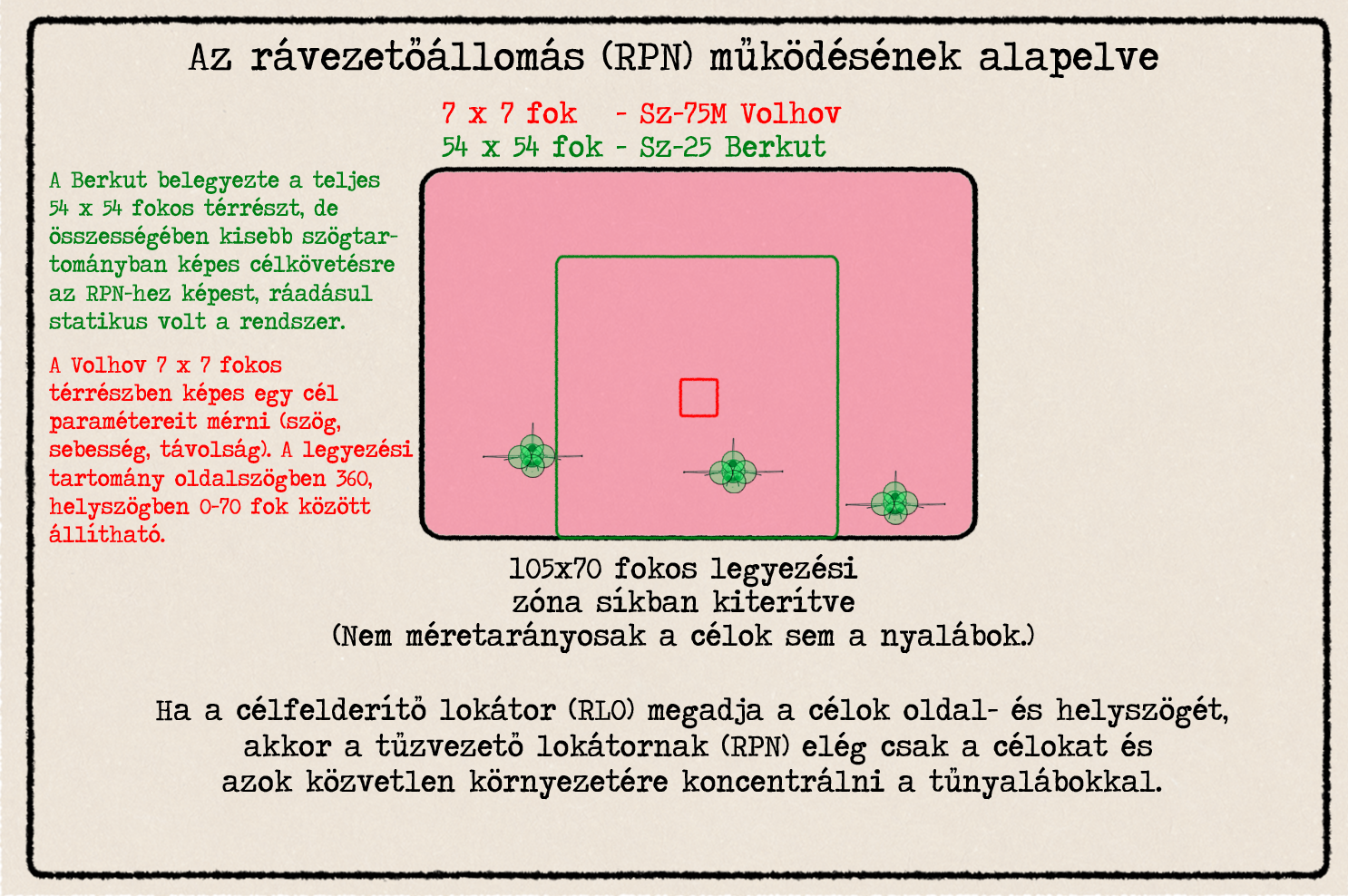
Érdemes némileg a múltba visszatekinteni, hogy megértsük a koncepció lényegét, hogy miben tudott többet az elődközhöz képest az RPN. A Berkut B-200 tűzvezető lokátora[5], NATO kódnevén a Yo-Yo 54x54 fokos térrészt legyezett be, de a teljes légteret, hiszen mechanikus legyezéssel csak ez lehetséges. Ehhez olyan hatalmas és speciális, 2x3 darab antennából álló antenna rendszer kellett, amit mobillá tenni nem lehetett volna. A Volhov rendszer két antennája csak egy 7x7 fokos térrészben mérte a cél oldal- és helyszögét is.
Ezzel szemben a Flap Lid lokátor 1 fokos tűnyalábokkal pásztázhatott odalszögben +/- 52 fok, helyszögben 0 és 70 fok között. A lokátor másodpercenként tízszer mérte 6 cél és 12 rakéta pozícióját. Tehát a Yo-Yo lokátorhoz képest a célkövetés tartománya sokkal nagyobb volt, de a valóban belegyezett terület azonos idő alatt mégis csak a töredéke, de azt a lokátor mondhatni intelligensen csinálta. A Yo-Yo féle megoldás rakéta rávezetési szempontból tehát túlzás, hiszen teljes oldalszög és helyszög tartományt letapogatja, addig az Sz-300-nál az RPN csak a célpontokat és azok körüli légteret leváló céljelek után kutatva, ami a radar elleni rakéták indításának észlelése miatt szükséges.
A Berkuthoz képest az RPN tűzvezető radar „intelligenciájának” következménye, hogy annak viszonylagos vakságát is jelentette a RPN-nek célfelderítési szempontból, hiszen az csak a kijelölt és követett célokra fókuszált, illetve, ha volt szabad cél és rakéta csatorna, akkor azokat felhasználva végezhetett önálló célkutatást. De még ezzel is messze meghaladta a Nyeva és Volhov rendszereket, ahol a tűzvezető lokátor csak az egyetlen követett cél körüli néhány fokos tartományt legyezte be. Az RPN 6 darab célt tudott követni, tehát 6 célt tapogatott körbe tűnyalábokkal, de ezek bárhol lehettek a 105x70 fokos térrészben.
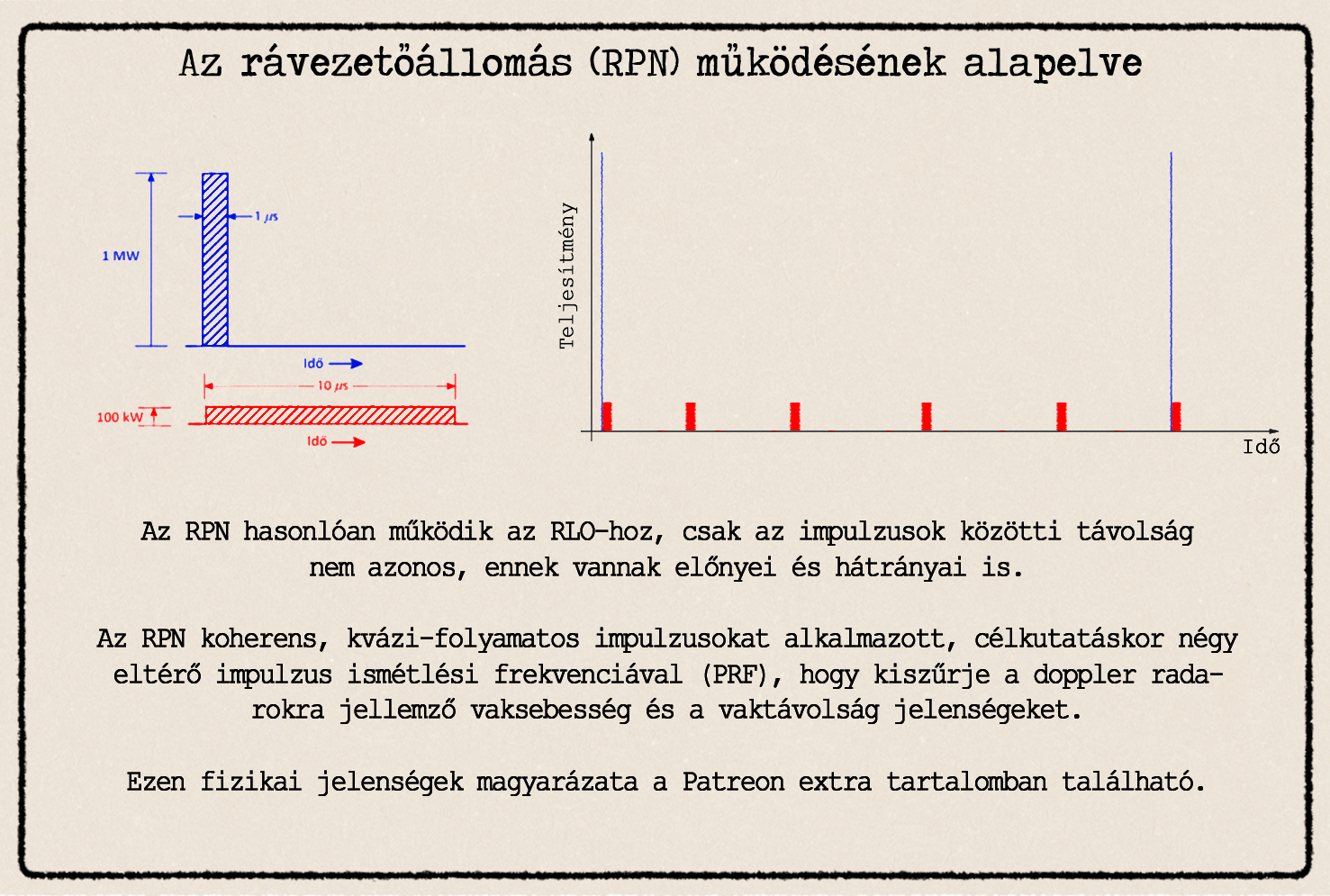
Az RPN koherens, kvázi folyamatos impulzusokat alkalmazott, célkutatáskor négy eltérő impulzus ismétlési frekvenciával (PRF), hogy kiszűrje a doppler radarokra jellemző vaksebesség és a vaktávolság jelenségeket. Ezen fizikai jelenségek bővebb magyarázata a Patreon extra tartalomban található.
Az RPN tehát képest volt a cél szöghelyzete mellett a céltávolság és célsebesség mérésére is. Vagyis, ha már egyszer követésbe vette a célt, akkor számolható és meghatározható, hogy a folyamatos célkövetéshez mekkora oldalszöggel és helyszöggel kell megvilágítani majd.
Hogy megértsük, hogy mekkora előrelépés volt az RPN, csak tekintsük át röviden, hogy az elődök hogyan működtek. Az Sz-25/75/125 trió csak a céltávolságot és a célok oldal- és helyszögeit mérte, ebből számolta a célsebességet. Az Sz-75/125 csak egyetlen cél sebességének mérésére volt alkalmas, hiába látszódtak akár a követett cél mellett más céljelek is. Az Sz-200 rendszernél az RPC alapból csak sebességet mért és utána számolta a cél helyzetét, a mérés kezdetén a távolság adatot a P-14 lokátor adta. Ha szükséges volt, akkor egyszer rámért a távolságra, a monokromatikus jel fázis modulációjával. Na, ehhez képest az Sz-300 RPN lokátora 6 darab célpont és 12 darab rakéta távolságát, oldal- és helyszögét, valamint a sebességét is mérte tizedmásodpercenként, nem csak számolta.

Ezek után lássuk, hogy milyen legyezés volt lehetséges az RPN-nel:
- Amennyiben a RLO / Big Bird lokátortól vagy automatizált vezetési rendszeren keresztül kapott célkoordinátát, akkor a célpont felderítésekor egy 4x4 fokos térrészt tapogatott le az RPN.
- Ha a kismagasságon felderítő lokátor, az NVO adja a külső célmegjelölést, akkor csak egy 1x6 fokos térrészt tapogatott le az RPN, tehát sokkal gyorsabban követésbe veszi a célt az előző esethez képest.
- Ha csak rádión, szóban állt rendelkezésre céladat, akkor annak időbeli hossza és késése miatt 4x12 fokos térrészt legyezett be az RPN.
- Az RPN alkalmas volt autonóm célkutatásra is, ezt egy 1x105 fokos térrészben hajtotta végre, sávnak a magassága, vagyis a helyszöge tetszőlegesen volt állítható.
- Ezen felül a rendszer az indított rakétákat is követte, ez mindkét alkalmazott távirányítási módszerhez szükséges volt. Ahogy a rakéta távolodott, úgy egyre kisebb térrész belegyezése is elég volt a rakéták követéséhez, hiszen a relatív szögelmozdulás csökken és ráadásul a rakéta lassul is. Ehhez képest indítás utáni 8-10 másodpercben volt a rakéta a leggyorsabb, amikor még közel is volt.
Az RPN egy MiG-21 méretű célt jellemzően 125 kilométerről volt képes követni, 0,1 m2 radarkeresztmetszetű robotrepülőgép célt 30 kilométerről. A maximálisan kijelzett távolság 200 kilométer volt, a cél maximális magassága 27 ezer méter. Az RPN centiméteres hullámhossz tartományban, „X” sávban üzemelt, de rövidebb hullámhosszal, mint az NVO.
Telepítés menetből, illetve bontás ideje az PT változatnál 2 óra volt, a PSz változatnál 5 perc, ahol a lokátor már egy önjáró járműre volt telepítve. A bekapcsolás ideje telepített helyzetben mindkettőnél 3 perc.

Az első Sz-300 változat a PT, még tisztán rádió-parancsközlő vezérléssel rendelkezett, elnevezése távirányítás-1 (TU-1). Az új elven működő radarral érte el az Sz-300PT, hogy egy időben 6 darab célra 12 darab rakétát volt képes rávezetni. Viszont az RPK módszer pontossága a távolsággal romlik, ami 47 kilométeres távolságra korlátozta a rakéta rávezetést. Ami még fontos kitétel, hogy a célcsatornák között nem oszthatók szét tetszőlegesen a rakéták. Minden célra vagy 1 vagy 2 darab rakéta vezethető rá, több nem. Tehát olyan nem lehetséges, hogy a 12 rakéta csatornával 4 célra vezet rá a rendszer egy időben 3-3 darab rakétát. Ebben az esetben 4 célcsatorna és 8 rakétacsatorna használható, a fennmaradó, kihasználatlan legyezési időt a célkeresésre használhatja az RPN.
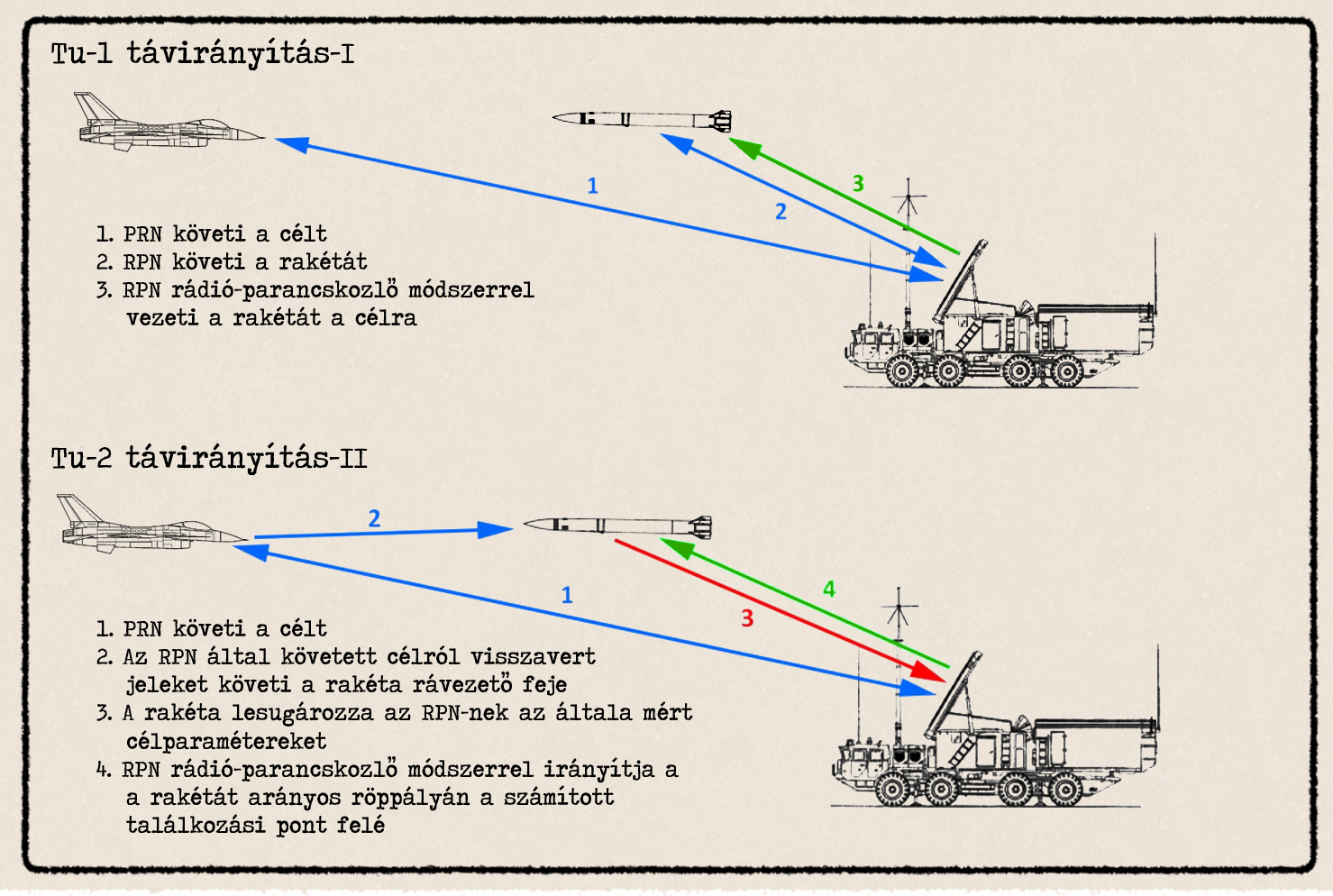
A PSz változatnál használt távirányítás-2 (TU-2) vezérlés hasonlít a PATRIOT rendszernél alkalmazott TVM, vagyis Track Via Missile-ra. Ennek alapelve, hogy a lokátor által követett cél visszaverődését a lokátor ÉS a rakéta is veszi /innen a 2/. A módszer előnye, hogy a cél kiháromszögelése miatt ez számtalan zavarási módszert teljesen hatástalanná tesz, illetve ennek hatótávolsága meghaladja már az 50 kilométert.

Mivel az Sz-300 moduláris felépítésű, ezért igény esetén az RPN is telepíthető a 40V6M állványra, mint az NVO, tehát a tűzvezető radar célkövetési távolságát is lehetséges kitolni kismagasságú célpontok ellen. Viszont ennek alkalmazása 1 órára növeli a megállástól számított tűzkészültségi időt. De erről és másról is már csak az anyag 2. részében esik szó...
[1] https://youtu.be/4-YfWquQ8B0
[2] https://youtu.be/--5Vkqv-6Uo?t=1, https://youtu.be/AmxaRAVmQ_A, https://youtu.be/Hu2aoac5IpA
[3] https://youtu.be/AmxaRAVmQ_A
[4] https://en.wikipedia.org/wiki/Passive_electronically_scanned_array#/media/File:Phased_array_animation_with_arrow_10frames_371x400px_100ms.gif
[5] https://youtu.be/_9ksU4msWx8
Közreműködők
- Molnár Balázs Grafika, animáció, szöveg
- Hpasp Technikai lektor és tartalombővítés
- Cifka”Cifu” Miklós Technikai lektor
A Patreon csatorna elérhetősége az extra tartalomhoz és a csatorna támogatásához.








{kind=link}
{kind=link}